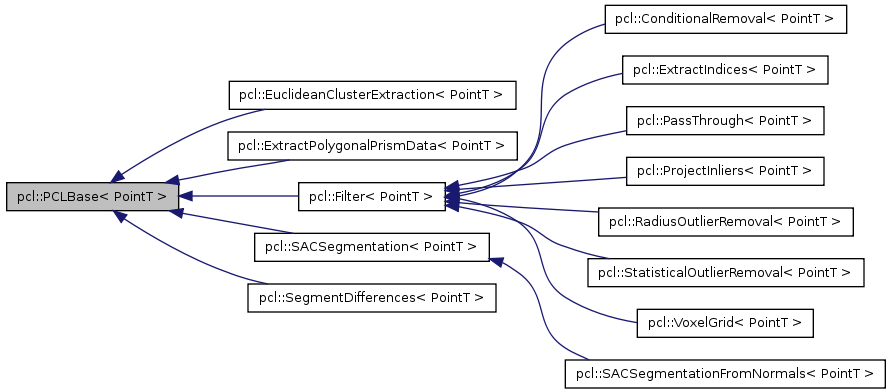
PCL base class. Implements methods that are used by all PCL objects. More...
#include <pcl_base.h>
Public Types | |
| typedef pcl::PointCloud< PointT > | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
| typedef PointIndices::ConstPtr | PointIndicesConstPtr |
| typedef PointIndices::Ptr | PointIndicesPtr |
Public Member Functions | |
| IndicesConstPtr const | getIndices () |
| Get a pointer to the vector of indices used. | |
| PointCloudConstPtr const | getInputCloud () |
| Get a pointer to the input point cloud dataset. | |
| PCLBase () | |
| Empty constructor. | |
| void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
Protected Member Functions | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
Protected Attributes | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
| IndicesConstPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
PCL base class. Implements methods that are used by all PCL objects.
Definition at line 67 of file pcl_base.h.
| typedef pcl::PointCloud<PointT> pcl::PCLBase< PointT >::PointCloud |
Reimplemented in pcl::ConditionalRemoval< PointT >, pcl::ExtractIndices< PointT >, pcl::Filter< PointT >, pcl::PassThrough< PointT >, pcl::ProjectInliers< PointT >, pcl::RadiusOutlierRemoval< PointT >, pcl::StatisticalOutlierRemoval< PointT >, pcl::VoxelGrid< PointT >, pcl::EuclideanClusterExtraction< PointT >, pcl::ExtractPolygonalPrismData< PointT >, pcl::SACSegmentation< PointT >, pcl::SACSegmentationFromNormals< PointT, PointNT >, pcl::SegmentDifferences< PointT >, pcl::ConcaveHull< PointInT >, and pcl::ConvexHull< PointInT >.
Definition at line 70 of file pcl_base.h.
| typedef PointCloud::ConstPtr pcl::PCLBase< PointT >::PointCloudConstPtr |
Reimplemented in pcl::ConditionalRemoval< PointT >, pcl::ExtractIndices< PointT >, pcl::Filter< PointT >, pcl::PassThrough< PointT >, pcl::ProjectInliers< PointT >, pcl::RadiusOutlierRemoval< PointT >, pcl::StatisticalOutlierRemoval< PointT >, pcl::VoxelGrid< PointT >, pcl::EuclideanClusterExtraction< PointT >, pcl::ExtractPolygonalPrismData< PointT >, pcl::SACSegmentation< PointT >, pcl::SACSegmentationFromNormals< PointT, PointNT >, pcl::SegmentDifferences< PointT >, pcl::ConcaveHull< PointInT >, and pcl::ConvexHull< PointInT >.
Definition at line 72 of file pcl_base.h.
| typedef PointCloud::Ptr pcl::PCLBase< PointT >::PointCloudPtr |
Reimplemented in pcl::ConditionalRemoval< PointT >, pcl::ExtractIndices< PointT >, pcl::Filter< PointT >, pcl::PassThrough< PointT >, pcl::ProjectInliers< PointT >, pcl::RadiusOutlierRemoval< PointT >, pcl::StatisticalOutlierRemoval< PointT >, pcl::VoxelGrid< PointT >, pcl::EuclideanClusterExtraction< PointT >, pcl::ExtractPolygonalPrismData< PointT >, pcl::SACSegmentation< PointT >, pcl::SACSegmentationFromNormals< PointT, PointNT >, pcl::SegmentDifferences< PointT >, pcl::ConcaveHull< PointInT >, pcl::ConvexHull< PointInT >, and pcl::GridProjection< PointNT >.
Definition at line 71 of file pcl_base.h.
| typedef PointIndices::ConstPtr pcl::PCLBase< PointT >::PointIndicesConstPtr |
Reimplemented in pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >, pcl::IterativeClosestPoint< PointSource, PointTarget >, pcl::IterativeClosestPointNonLinear< PointSource, PointTarget >, pcl::EuclideanClusterExtraction< PointT >, pcl::ExtractPolygonalPrismData< PointT >, and pcl::SegmentDifferences< PointT >.
Definition at line 75 of file pcl_base.h.
| typedef PointIndices::Ptr pcl::PCLBase< PointT >::PointIndicesPtr |
Reimplemented in pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >, pcl::IterativeClosestPoint< PointSource, PointTarget >, pcl::IterativeClosestPointNonLinear< PointSource, PointTarget >, pcl::EuclideanClusterExtraction< PointT >, pcl::ExtractPolygonalPrismData< PointT >, and pcl::SegmentDifferences< PointT >.
Definition at line 74 of file pcl_base.h.
| pcl::PCLBase< PointT >::PCLBase | ( | ) | [inline] |
Empty constructor.
Definition at line 78 of file pcl_base.h.
| bool pcl::PCLBase< PointT >::deinitCompute | ( | ) | [inline, protected] |
This method should get called after finishing the actual computation.
Definition at line 158 of file pcl_base.h.
| IndicesConstPtr const pcl::PCLBase< PointT >::getIndices | ( | ) | [inline] |
Get a pointer to the vector of indices used.
Definition at line 114 of file pcl_base.h.
| PointCloudConstPtr const pcl::PCLBase< PointT >::getInputCloud | ( | ) | [inline] |
Get a pointer to the input point cloud dataset.
Definition at line 88 of file pcl_base.h.
| bool pcl::PCLBase< PointT >::initCompute | ( | ) | [inline, protected] |
This method should get called before starting the actual computation.
Definition at line 131 of file pcl_base.h.
| void pcl::PCLBase< PointT >::setIndices | ( | const PointIndicesConstPtr & | indices | ) | [inline] |
Provide a pointer to the vector of indices that represents the input data.
| indices | a pointer to the vector of indices that represents the input data. |
Definition at line 105 of file pcl_base.h.
| void pcl::PCLBase< PointT >::setIndices | ( | const IndicesConstPtr & | indices | ) | [inline] |
Provide a pointer to the vector of indices that represents the input data.
| indices | a pointer to the vector of indices that represents the input data. |
Reimplemented in pcl::FPFHEstimation< PointInT, PointNT, PointOutT >.
Definition at line 94 of file pcl_base.h.
| virtual void pcl::PCLBase< PointT >::setInputCloud | ( | const PointCloudConstPtr & | cloud | ) | [inline, virtual] |
Provide a pointer to the input dataset.
| cloud | the const boost shared pointer to a PointCloud message |
Definition at line 84 of file pcl_base.h.
bool pcl::PCLBase< PointT >::fake_indices_ [protected] |
If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud.
Definition at line 127 of file pcl_base.h.
IndicesConstPtr pcl::PCLBase< PointT >::indices_ [protected] |
A pointer to the vector of point indices to use.
Definition at line 121 of file pcl_base.h.
PointCloudConstPtr pcl::PCLBase< PointT >::input_ [protected] |
The input point cloud dataset.
Definition at line 118 of file pcl_base.h.
bool pcl::PCLBase< PointT >::use_indices_ [protected] |
Set to true if point indices are used.
Definition at line 124 of file pcl_base.h.

