README
raspimouse_description
![]()
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim. See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
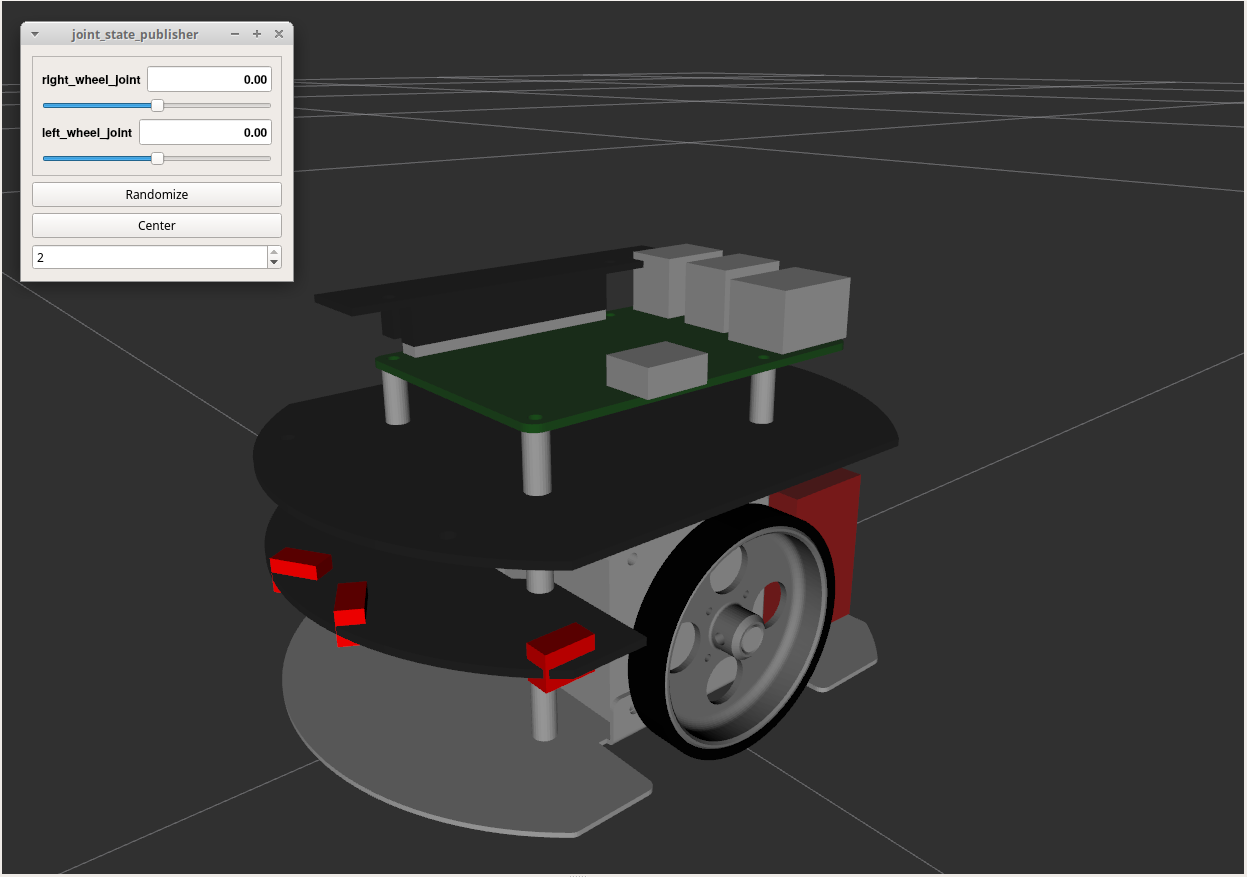
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
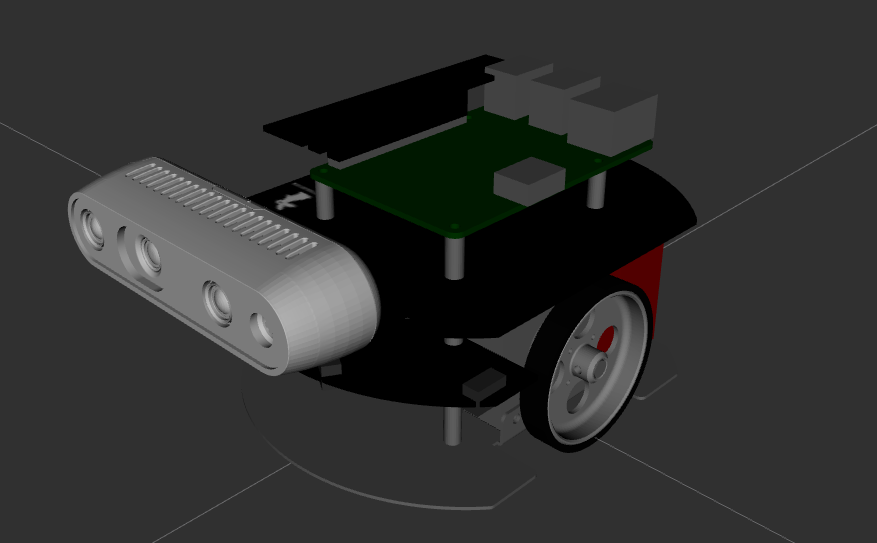
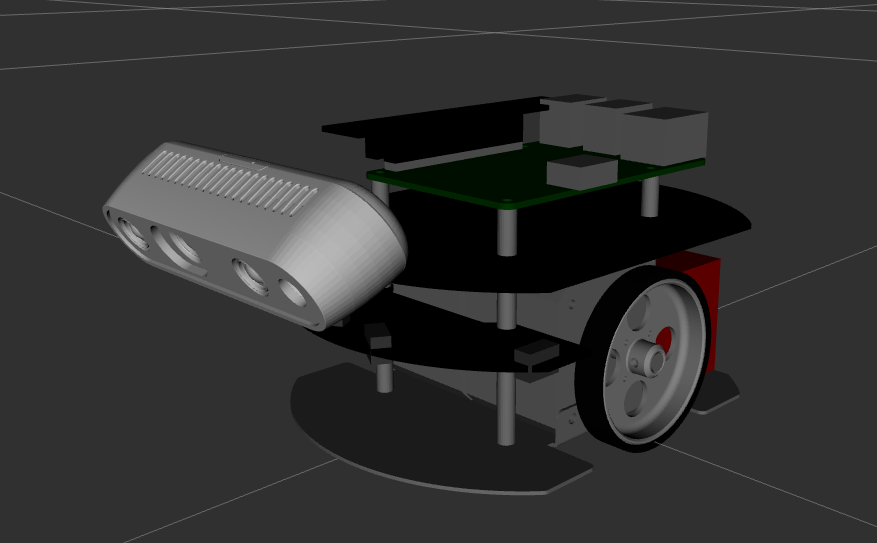
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE. Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.