#include <opw_kinematics/opw_macros.h>#include <gtest/gtest.h>#include <cstdlib>#include <array>#include <cmath>#include <iomanip>#include <iostream>#include <vector>#include "ikfast.h"#include "opw_kinematics/opw_kinematics.h"#include "opw_kinematics/opw_utilities.h"#include "opw_kinematics/opw_parameters_examples.h"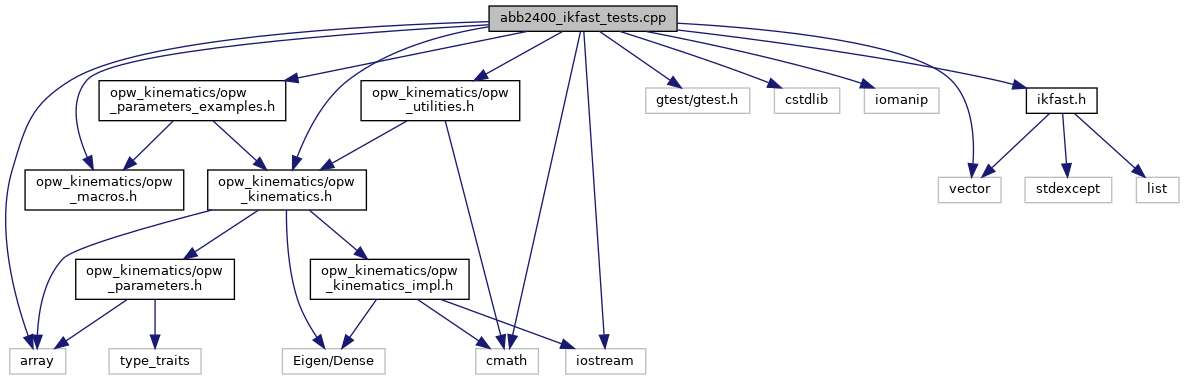
Go to the source code of this file.
Classes | |
| struct | PoseGenerator |
Typedefs | |
| using | Solutions = opw_kinematics::Solutions< double > |
| using | Transform = opw_kinematics::Transform< double > |
Functions | |
| void | compare (ikfast::IkSolutionList< double > &ikf, Solutions &opw) |
| std::size_t | countValidSolutions (const Solutions &opw) |
| bool | findSolInSet (const std::array< double, 6 > &s, const Solutions &opw) |
| int | main (int argc, char **argv) |
| static double | normalize_angle (double angle) |
| normalize More... | |
| static double | normalize_angle_positive (double angle) |
| normalize_angle_positive More... | |
| void | printResults (const Solutions &sols) |
| static double | shortest_angular_distance (double from, double to) |
| shortest_angular_distance More... | |
| void | solveIKFast (const Transform &p, ikfast::IkSolutionList< double > &sols) |
| Solutions | solveOPW (const opw_kinematics::Parameters< double > ¶m, const Transform &p) |
| TEST (ikfast_to_opw, similar_solutions) | |
Typedef Documentation
◆ Solutions
| using Solutions = opw_kinematics::Solutions<double> |
Definition at line 18 of file abb2400_ikfast_tests.cpp.
◆ Transform
| using Transform = opw_kinematics::Transform<double> |
Definition at line 17 of file abb2400_ikfast_tests.cpp.
Function Documentation
◆ compare()
| void compare | ( | ikfast::IkSolutionList< double > & | ikf, |
| Solutions & | opw | ||
| ) |
Definition at line 152 of file abb2400_ikfast_tests.cpp.
◆ countValidSolutions()
| std::size_t countValidSolutions | ( | const Solutions & | opw | ) |
Definition at line 67 of file abb2400_ikfast_tests.cpp.
◆ findSolInSet()
| bool findSolInSet | ( | const std::array< double, 6 > & | s, |
| const Solutions & | opw | ||
| ) |
Definition at line 118 of file abb2400_ikfast_tests.cpp.
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 205 of file abb2400_ikfast_tests.cpp.
◆ normalize_angle()
|
inlinestatic |
normalize
Normalizes the angle to be -M_PI circle to +M_PI circle It takes and returns radians.
Definition at line 96 of file abb2400_ikfast_tests.cpp.
◆ normalize_angle_positive()
|
inlinestatic |
normalize_angle_positive
Normalizes the angle to be 0 to 2*M_PI It takes and returns radians.
Definition at line 84 of file abb2400_ikfast_tests.cpp.
◆ printResults()
| void printResults | ( | const Solutions & | sols | ) |
Definition at line 141 of file abb2400_ikfast_tests.cpp.
◆ shortest_angular_distance()
|
inlinestatic |
shortest_angular_distance
\function Given 2 angles, this returns the shortest angular difference. The inputs and ouputs are of course radians.
The result would always be -pi <= result <= pi. Adding the result to "from" will always get you an equivelent angle to "to".
Definition at line 116 of file abb2400_ikfast_tests.cpp.
◆ solveIKFast()
| void solveIKFast | ( | const Transform & | p, |
| ikfast::IkSolutionList< double > & | sols | ||
| ) |
Definition at line 41 of file abb2400_ikfast_tests.cpp.
◆ solveOPW()
| Solutions solveOPW | ( | const opw_kinematics::Parameters< double > & | param, |
| const Transform & | p | ||
| ) |
Definition at line 62 of file abb2400_ikfast_tests.cpp.
◆ TEST()
| TEST | ( | ikfast_to_opw | , |
| similar_solutions | |||
| ) |
Definition at line 179 of file abb2400_ikfast_tests.cpp.