#include <vector>#include "steering_functions/steering_functions.hpp"#include "fields2cover/types.h"
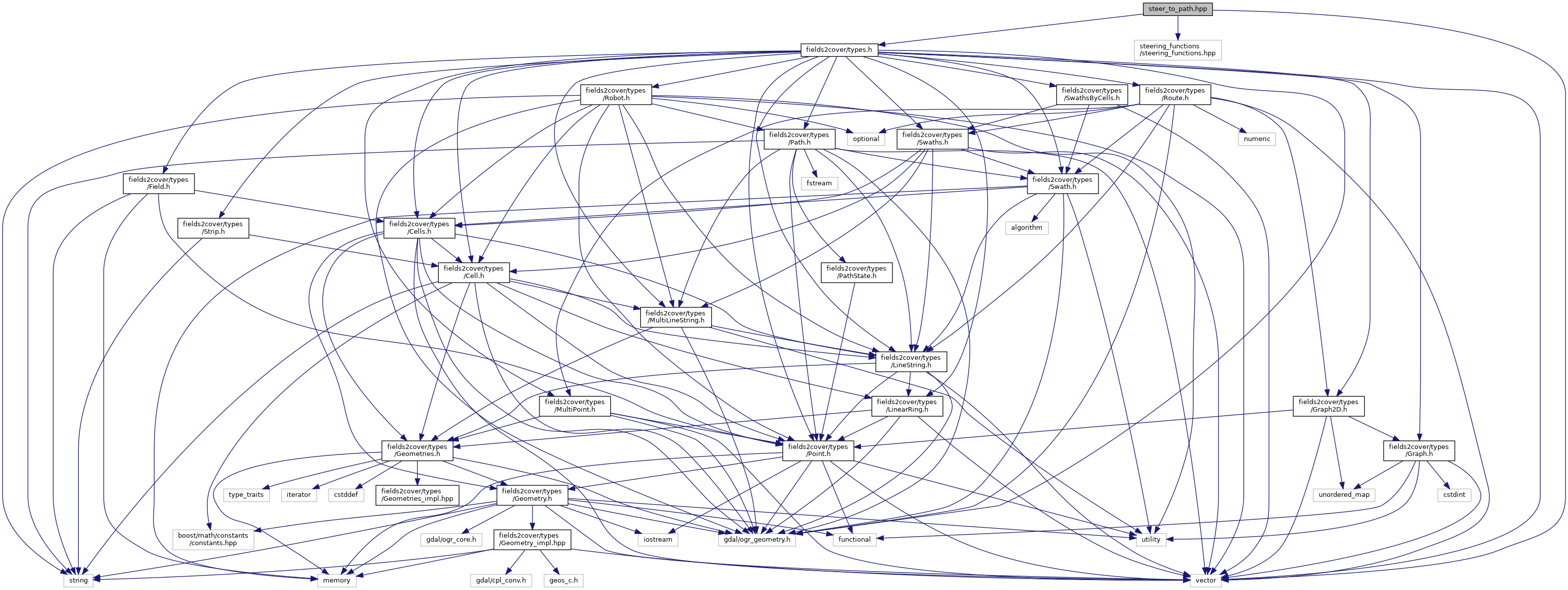
Include dependency graph for steer_to_path.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| f2c | |
| Main namespace of the fields2cover library. | |
| f2c::pp | |
| Path planning algorithms' namespace. | |
Macros | |
| #define | FIELDS2COVER_PATH_PLANNING_STEER_TO_PATH_HPP_ |
Functions | |
| bool | f2c::pp::loop_detected (const std::vector< steer::Control > &controls) |
| types::Path | f2c::pp::steerStatesToPath (const std::vector< steer::State > &curve, double const_vel) |
Macro Definition Documentation
◆ FIELDS2COVER_PATH_PLANNING_STEER_TO_PATH_HPP_
| #define FIELDS2COVER_PATH_PLANNING_STEER_TO_PATH_HPP_ |
Definition at line 9 of file steer_to_path.hpp.