#include "fcl/narrowphase/collision.h"#include "fcl/narrowphase/collision_request.h"#include "fcl/narrowphase/collision_result.h"#include "fcl/narrowphase/continuous_collision.h"#include "fcl/narrowphase/continuous_collision_request.h"#include "fcl/narrowphase/continuous_collision_result.h"#include "fcl/narrowphase/distance.h"#include "fcl/narrowphase/distance_request.h"#include "fcl/narrowphase/distance_result.h"
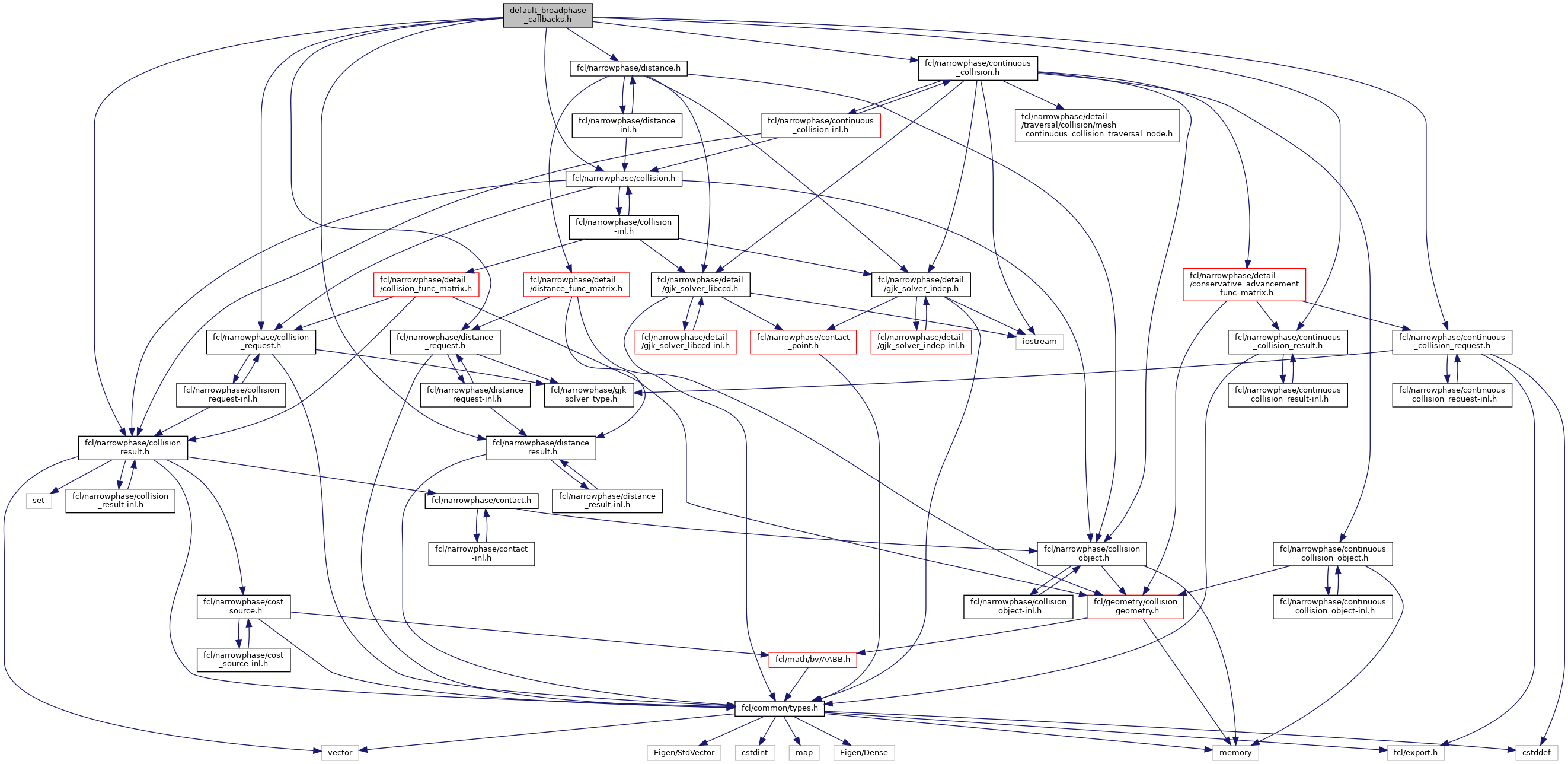
Include dependency graph for default_broadphase_callbacks.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | fcl::DefaultCollisionData< S > |
| Collision data for use with the DefaultCollisionFunction. It stores the collision request and the result given by collision algorithm (and stores the conclusion of whether further evaluation of the broadphase collision manager has been deemed unnecessary). More... | |
| struct | fcl::DefaultContinuousCollisionData< S > |
| Collision data for use with the DefaultContinuousCollisionFunction. It stores the collision request and the result given by the collision algorithm (and stores the conclusion of whether further evaluation of the broadphase collision manager has been deemed unnecessary). More... | |
| struct | fcl::DefaultDistanceData< S > |
| Distance data for use with the DefaultDistanceFunction. It stores the distance request and the result given by distance algorithm (and stores the conclusion of whether further evaluation of the broadphase collision manager has been deemed unnecessary). More... | |
Namespaces | |
| fcl | |
| Main namespace. | |
Functions | |
| template<typename S > | |
| bool | fcl::DefaultCollisionFunction (CollisionObject< S > *o1, CollisionObject< S > *o2, void *data) |
Provides a simple callback for the collision query in the BroadPhaseCollisionManager. It assumes the data parameter is non-null and points to an instance of DefaultCollisionData. It simply invokes the collide() method on the culled pair of geometries and stores the results in the data's CollisionResult instance. More... | |
| template<typename S > | |
| bool | fcl::DefaultContinuousCollisionFunction (ContinuousCollisionObject< S > *o1, ContinuousCollisionObject< S > *o2, void *data) |
Provides a simple callback for the continuous collision query in the BroadPhaseCollisionManager. It assumes the data parameter is non-null and points to an instance of DefaultContinuousCollisionData. It simply invokes the collide() method on the culled pair of geometries and stores the results in the data's ContinuousCollisionResult instance. More... | |
| template<typename S > | |
| bool | fcl::DefaultDistanceFunction (CollisionObject< S > *o1, CollisionObject< S > *o2, void *data, S &dist) |
Provides a simple callback for the distance query in the BroadPhaseCollisionManager. It assumes the data parameter is non-null and points to an instance of DefaultDistanceData. It simply invokes the distance() method on the culled pair of geometries and stores the results in the data's DistanceResult instance. More... | |