Implementation of a likelihood field sensor model for range finders. More...
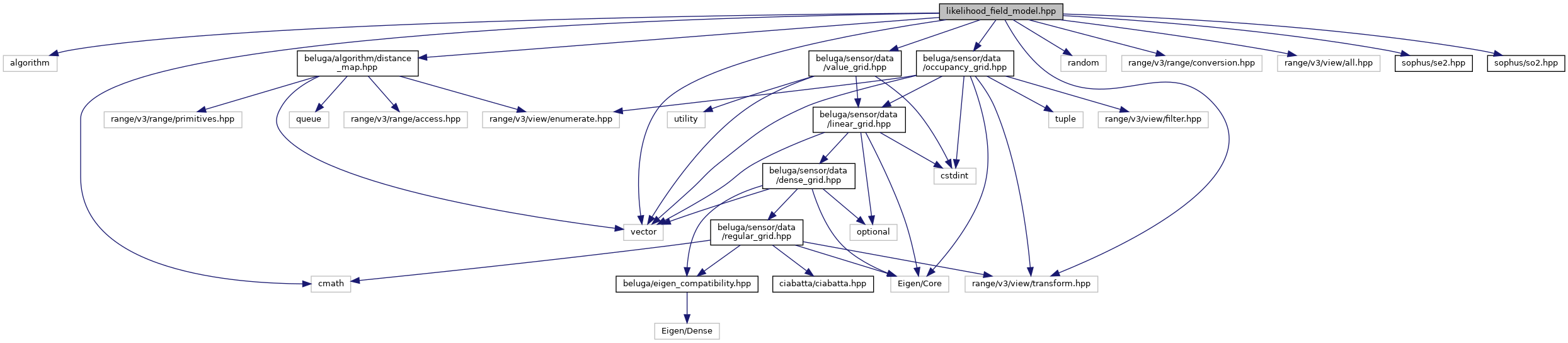
#include <algorithm>#include <cmath>#include <random>#include <vector>#include <beluga/algorithm/distance_map.hpp>#include <beluga/sensor/data/occupancy_grid.hpp>#include <beluga/sensor/data/value_grid.hpp>#include <range/v3/range/conversion.hpp>#include <range/v3/view/all.hpp>#include <range/v3/view/transform.hpp>#include <sophus/se2.hpp>#include <sophus/so2.hpp>
Include dependency graph for likelihood_field_model.hpp:
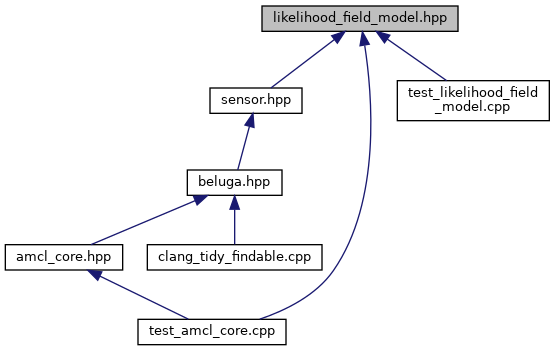
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | beluga::LikelihoodFieldModel< OccupancyGrid > |
| Likelihood field sensor model for range finders. More... | |
| struct | beluga::LikelihoodFieldModelParam |
| Parameters used to construct a LikelihoodFieldModel instance. More... | |
Namespaces | |
| beluga | |
| The main Beluga namespace. | |
Detailed Description
Implementation of a likelihood field sensor model for range finders.
Definition in file likelihood_field_model.hpp.