Occupancy 2D grid base type. More...
#include <occupancy_grid.hpp>
Public Types | |
| enum | Frame : std::uint8_t { Frame::kLocal, Frame::kGlobal } |
| Coordinate frames. More... | |
Public Member Functions | |
| auto | coordinates_at (std::size_t index, Frame frame) const |
| Compute plane coordinates given grid cell coordinates. More... | |
| template<class Range > | |
| auto | coordinates_for (Range &&cells, Frame frame) const |
| Compute plane coordinates for a range of grid cells. More... | |
| bool | free_at (const Eigen::Vector2i &pi) const |
| Checks if cell is free. More... | |
| bool | free_at (int xi, int yi) const |
| Checks if cell is free. More... | |
| bool | free_at (std::size_t index) const |
| Checks if cell is free. More... | |
| auto | free_cells () const |
| Retrieves range of free grid cell indices. More... | |
| bool | free_near (const Eigen::Vector2d &p) const |
| Checks if nearest cell is free. More... | |
| bool | free_near (double x, double y) const |
| Checks if nearest cell is free. More... | |
| auto | obstacle_data () const |
| Retrieves grid data using true booleans for obstacles. More... | |
 Public Member Functions inherited from beluga::BaseLinearGrid2< Derived > Public Member Functions inherited from beluga::BaseLinearGrid2< Derived > | |
| Eigen::Vector2d | coordinates_at (std::size_t index) const |
| Compute plane coordinates given a grid cell index. More... | |
| auto | data_at (std::size_t index) const |
| Gets cell data, if included. More... | |
| std::size_t | index_at (const Eigen::Vector2i &pi) const |
| Computes index for given grid cell coordinates. More... | |
| std::size_t | index_at (int xi, int yi) const |
| Computes index for given grid cell coordinates. More... | |
| auto | neighborhood4 (std::size_t index) const |
| Computes 4-connected neighborhood for cell. More... | |
| Public Member Functions inherited from beluga::BaseDenseGrid2< Derived > | |
| bool | contains (const Eigen::Vector2i &pi) const |
| Checks if a cell is included in the grid. More... | |
| bool | contains (int xi, int yi) const |
| Checks if a cell is included in the grid. More... | |
| auto | data_at (const Eigen::Vector2i &pi) const |
| Gets cell data, if included. More... | |
| auto | data_at (int xi, int yi) const |
| Gets cell data, if included. More... | |
| auto | data_near (const Eigen::Vector2d &p) const |
| Gets nearest cell data, if included. More... | |
| auto | data_near (double x, double y) const |
| Gets nearest cell data, if included. More... | |
| auto | neighborhood4 (const Eigen::Vector2i &pi) const |
| Computes 4-connected neighborhood for cell. More... | |
| auto | neighborhood4 (int xi, int yi) const |
| Computes 4-connected neighborhood for cell. More... | |
| Public Member Functions inherited from beluga::BaseRegularGrid< Derived, NDim > | |
| Eigen::Vector< int, NDim > | cell_near (const Eigen::Vector< double, NDim > &p) const |
| Compute nearest grid cell coordinates given plane coordinates. More... | |
| Eigen::Vector< double, NDim > | coordinates_at (const Eigen::Vector< int, NDim > &pi) const |
| Compute plane coordinates given grid cell coordinates. More... | |
| template<class Range > | |
| auto | coordinates_for (Range &&cells) const |
| Compute plane coordinates given a range of cell coordinates. More... | |
Detailed Description
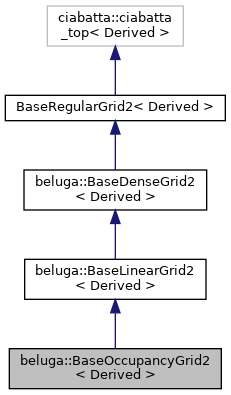
template<typename Derived>
class beluga::BaseOccupancyGrid2< Derived >
Occupancy 2D grid base type.
When instantiated, it satisfies Beluga named requirements: OccupancyGrid2d.
- Template Parameters
-
Derived Concrete occupancy grid type. It must define Derived::origin(),Derived::width(),Derived::height(),Derived::resolution(),Derived::data_at(std::size_t),Derived::index_at(int, int),Derived::data(), andDerived::value_traits()as described in Beluga named requirements: OccupancyGrid2d.
Definition at line 85 of file occupancy_grid.hpp.
Member Enumeration Documentation
◆ Frame
|
strong |
Member Function Documentation
◆ coordinates_at()
|
inline |
Compute plane coordinates given grid cell coordinates.
- Parameters
-
index Grid cell index. frame Plane coordinate frame.
- Returns
- Plane coordinates in the corresponding
frame.
Definition at line 148 of file occupancy_grid.hpp.
◆ coordinates_for()
|
inline |
Compute plane coordinates for a range of grid cells.
- Parameters
-
cells Range of grid cell indices or coordinates. frame Plane coordinate frame.
- Returns
- Range of plane coordinates in the corresponding
frame.
Definition at line 163 of file occupancy_grid.hpp.
◆ free_at() [1/3]
|
inline |
Checks if cell is free.
Note cells not included in the grid are non-free too.
- Parameters
-
pi Grid cell coordinates.
Definition at line 119 of file occupancy_grid.hpp.
◆ free_at() [2/3]
|
inline |
Checks if cell is free.
Note cells not included in the grid are non-free too.
- Parameters
-
xi Grid cell x-axis coordinate. yi Grid cell y-axis coordinate.
Definition at line 111 of file occupancy_grid.hpp.
◆ free_at() [3/3]
|
inline |
Checks if cell is free.
Note cells not included in the grid are non-free too.
- Parameters
-
index Grid cell index.
Definition at line 96 of file occupancy_grid.hpp.
◆ free_cells()
|
inline |
Retrieves range of free grid cell indices.
Definition at line 169 of file occupancy_grid.hpp.
◆ free_near() [1/2]
|
inline |
Checks if nearest cell is free.
Note cells not included in the grid are non-free too.
- Parameters
-
p Plane coordinates.
Definition at line 138 of file occupancy_grid.hpp.
◆ free_near() [2/2]
|
inline |
Checks if nearest cell is free.
Note cells not included in the grid are non-free too.
- Parameters
-
x Plane x-axis coordinate. y Plane y-axis coordinate.
Definition at line 128 of file occupancy_grid.hpp.
◆ obstacle_data()
|
inline |
Retrieves grid data using true booleans for obstacles.
Definition at line 178 of file occupancy_grid.hpp.
The documentation for this class was generated from the following file: