http://ros.org/wiki/pr2_controllers/Tutorials/Moving%20the%20arm%20using%20the%20Joint%20Trajectory%20Action More...
#include <ros/ros.h>#include <control_msgs/FollowJointTrajectoryAction.h>#include <actionlib/client/simple_action_client.h>
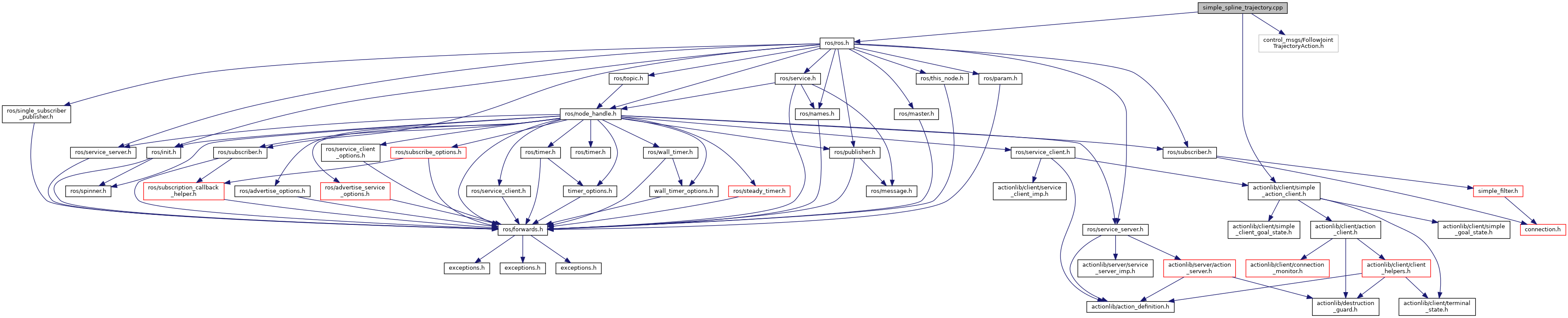
Include dependency graph for simple_spline_trajectory.cpp:
Go to the source code of this file.
Classes | |
| class | ShadowTrajectory |
Typedefs | |
| typedef actionlib::SimpleActionClient< control_msgs::FollowJointTrajectoryAction > | TrajClient |
Functions | |
| int | main (int argc, char **argv) |
Detailed Description
Definition in file simple_spline_trajectory.cpp.
Typedef Documentation
◆ TrajClient
| typedef actionlib::SimpleActionClient<control_msgs::FollowJointTrajectoryAction> TrajClient |
Definition at line 30 of file simple_spline_trajectory.cpp.
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 174 of file simple_spline_trajectory.cpp.