Unit tests for NavState. More...
#include <gtsam/navigation/NavState.h>#include <gtsam/base/lieProxies.h>#include <gtsam/base/numericalDerivative.h>#include <gtsam/base/TestableAssertions.h>#include <gtsam/base/testLie.h>#include <CppUnitLite/TestHarness.h>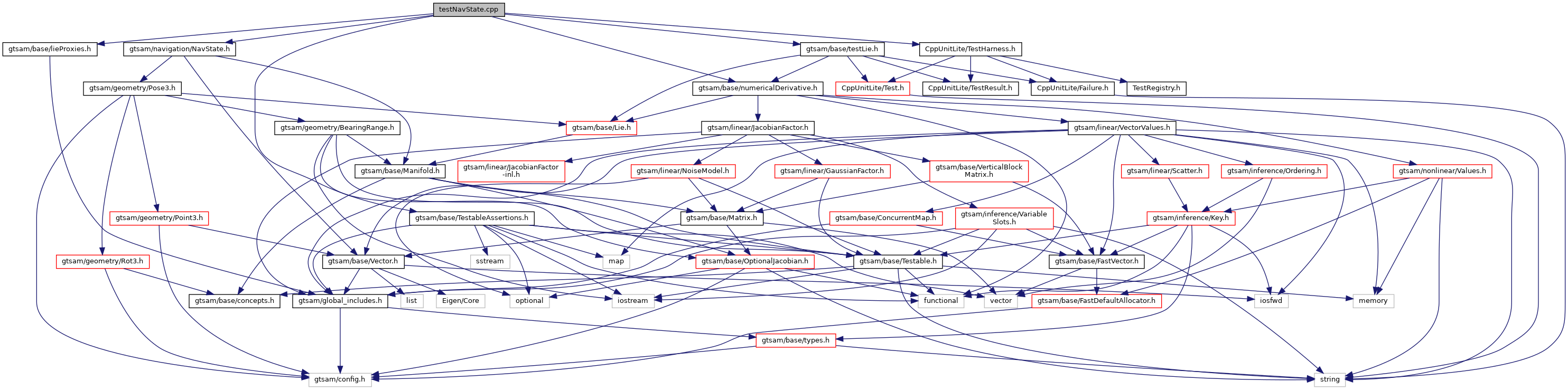
Go to the source code of this file.
Namespaces | |
| screwNavState | |
Functions | |
| Point3 | screwNavState::expectedP (0.29552, 0.0446635, 1) |
| Rot3 | screwNavState::expectedR (c, -s, 0, s, c, 0, 0, 0, 1) |
| Point3 | screwNavState::expectedV (0.29552, 0.0446635, 1) |
| static const Vector3 | kGravity (0, 0, 9.81) |
| static const Vector3 | kOmegaCoriolis (0.02, 0.03, 0.04) |
| static const Point3 | kPosition (1.0, 2.0, 3.0) |
| static const Velocity3 | kVelocity (0.4, 0.5, 0.6) |
| int | main () |
| static const Point3 | P (0.2, 0.7, -2) |
| static const Point3 | P2 (3.5, -8.2, 4.2) |
| TEST (NavState, Adjoint_compose_full) | |
| TEST (NavState, Adjoint_full) | |
| TEST (NavState, Adjoint_hat) | |
| TEST (NavState, adjointMap) | |
| TEST (NavState, Attitude) | |
| TEST (NavState, Between) | |
| TEST (NavState, BodyVelocity) | |
| TEST (NavState, BruteForceExpmap1) | |
| TEST (NavState, BruteForceExpmap2) | |
| TEST (NavState, BruteForceExpmap3) | |
| TEST (NavState, ChartDerivatives) | |
| TEST (NavState, Compose) | |
| TEST (NavState, Compose2) | |
| TEST (NavState, Compose_Inverse) | |
| TEST (NavState, Concept) | |
| TEST (NavState, Constructor) | |
| TEST (NavState, Constructor2) | |
| TEST (NavState, Coriolis) | |
| TEST (NavState, Coriolis2) | |
| TEST (NavState, Coriolis3) | |
| TEST (NavState, CorrectPIM) | |
| TEST (NavState, Equals) | |
| TEST (NavState, Expmap_A_Full) | |
| TEST (NavState, Expmap_b) | |
| TEST (NavState, expmap_logmap) | |
| TEST (NavState, ExpmapDerivative1) | |
| TEST (NavState, HatAndVee) | |
| TEST (NavState, interpolate) | |
| TEST (NavState, Invariants) | |
| TEST (NavState, Inverse) | |
| TEST (NavState, InverseDerivatives) | |
| TEST (NavState, LieGroupDerivatives) | |
| TEST (NavState, LogmapDerivative) | |
| TEST (NavState, Manifold) | |
| TEST (NavState, manifold_expmap) | |
| TEST (NavState, Position) | |
| TEST (NavState, Print) | |
| TEST (NavState, Retract_first_order) | |
| TEST (NavState, Retract_LocalCoordinates) | |
| TEST (NavState, retract_localCoordinates) | |
| TEST (NavState, retract_localCoordinates2) | |
| TEST (NavState, RetractExpmap) | |
| TEST (NavState, Stream) | |
| TEST (NavState, subgroups) | |
| TEST (NavState, Velocity) | |
| static const Point3 | V (3, 0.4, -2.2) |
| static const Point3 | V2 (-6.5, 3.5, 6.2) |
Variables | |
| double | screwNavState::a = 0.3 |
| double | screwNavState::c = cos(a) |
| std::function< Vector9(const NavState &, const bool &)> | coriolis |
| static const double | dt = 2.0 |
| NavState | screwNavState::expected (expectedR, expectedV, expectedP) |
| static const Rot3 | kAttitude = Rot3::RzRyRx(0.1, 0.2, 0.3) |
| static const NavState | kIdentity |
| static const Pose3 | kPose (kAttitude, kPosition) |
| static const NavState | kState1 (kAttitude, kPosition, kVelocity) |
| static const Vector9 | kZeroXi = Vector9::Zero() |
| static const Rot3 | R = Rot3::Rodrigues(0.3, 0, 0) |
| double | screwNavState::s = sin(a) |
| static const NavState | T (R, P2, V2) |
| static const NavState | T2 (Rot3::Rodrigues(0.3, 0.2, 0.1), P2, V2) |
| static const NavState | T3 (Rot3::Rodrigues(-90, 0, 0), Point3(5, 6, 7), Point3(1, 2, 3)) |
| double | screwNavState::w = 0.3 |
| Vector | screwNavState::xi = (Vector(9) << 0.0, 0.0, w, w, 0.0, 1.0, w, 0.0, 1.0).finished() |
Detailed Description
Function Documentation
◆ kGravity()
|
static |
◆ kOmegaCoriolis()
|
static |
◆ kPosition()
|
static |
◆ kVelocity()
|
static |
◆ main()
| int main | ( | ) |
Definition at line 749 of file testNavState.cpp.
◆ P()
|
static |
◆ P2()
|
static |
◆ TEST() [1/45]
| TEST | ( | NavState | , |
| Adjoint_compose_full | |||
| ) |
Definition at line 531 of file testNavState.cpp.
◆ TEST() [2/45]
| TEST | ( | NavState | , |
| Adjoint_full | |||
| ) |
Definition at line 516 of file testNavState.cpp.
◆ TEST() [3/45]
| TEST | ( | NavState | , |
| Adjoint_hat | |||
| ) |
Definition at line 585 of file testNavState.cpp.
◆ TEST() [4/45]
| TEST | ( | NavState | , |
| adjointMap | |||
| ) |
Definition at line 666 of file testNavState.cpp.
◆ TEST() [5/45]
| TEST | ( | NavState | , |
| Attitude | |||
| ) |
Definition at line 96 of file testNavState.cpp.
◆ TEST() [6/45]
Definition at line 302 of file testNavState.cpp.
◆ TEST() [7/45]
| TEST | ( | NavState | , |
| BodyVelocity | |||
| ) |
Definition at line 128 of file testNavState.cpp.
◆ TEST() [8/45]
| TEST | ( | NavState | , |
| BruteForceExpmap1 | |||
| ) |
Definition at line 568 of file testNavState.cpp.
◆ TEST() [9/45]
| TEST | ( | NavState | , |
| BruteForceExpmap2 | |||
| ) |
Definition at line 573 of file testNavState.cpp.
◆ TEST() [10/45]
| TEST | ( | NavState | , |
| BruteForceExpmap3 | |||
| ) |
Definition at line 578 of file testNavState.cpp.
◆ TEST() [11/45]
| TEST | ( | NavState | , |
| ChartDerivatives | |||
| ) |
Definition at line 738 of file testNavState.cpp.
◆ TEST() [12/45]
| TEST | ( | NavState | , |
| Compose | |||
| ) |
Definition at line 205 of file testNavState.cpp.
◆ TEST() [13/45]
| TEST | ( | NavState | , |
| Compose2 | |||
| ) |
Definition at line 236 of file testNavState.cpp.
◆ TEST() [14/45]
| TEST | ( | NavState | , |
| Compose_Inverse | |||
| ) |
Definition at line 295 of file testNavState.cpp.
◆ TEST() [15/45]
| TEST | ( | NavState | , |
| Concept | |||
| ) |
Definition at line 56 of file testNavState.cpp.
◆ TEST() [16/45]
| TEST | ( | NavState | , |
| Constructor | |||
| ) |
Definition at line 63 of file testNavState.cpp.
◆ TEST() [17/45]
| TEST | ( | NavState | , |
| Constructor2 | |||
| ) |
Definition at line 83 of file testNavState.cpp.
◆ TEST() [18/45]
| TEST | ( | NavState | , |
| Coriolis | |||
| ) |
Definition at line 338 of file testNavState.cpp.
◆ TEST() [19/45]
| TEST | ( | NavState | , |
| Coriolis2 | |||
| ) |
Definition at line 349 of file testNavState.cpp.
◆ TEST() [20/45]
| TEST | ( | NavState | , |
| Coriolis3 | |||
| ) |
Consider a massless planet with an attached nav frame at n_omega = [0 0 1]', and a body at position n_t = [1 0 0]', travelling with velocity n_v = [0 1 0]'. Orient the body so that it is not instantaneously aligned with the nav frame (i.e., nRb != I_3x3). Test that first and second order Coriolis corrections are as expected.
Definition at line 362 of file testNavState.cpp.
◆ TEST() [21/45]
| TEST | ( | NavState | , |
| CorrectPIM | |||
| ) |
Definition at line 406 of file testNavState.cpp.
◆ TEST() [22/45]
| TEST | ( | NavState | , |
| Equals | |||
| ) |
Definition at line 196 of file testNavState.cpp.
◆ TEST() [23/45]
| TEST | ( | NavState | , |
| Expmap_A_Full | |||
| ) |
Definition at line 476 of file testNavState.cpp.
◆ TEST() [24/45]
| TEST | ( | NavState | , |
| Expmap_b | |||
| ) |
Definition at line 494 of file testNavState.cpp.
◆ TEST() [25/45]
| TEST | ( | NavState | , |
| expmap_logmap | |||
| ) |
Definition at line 618 of file testNavState.cpp.
◆ TEST() [26/45]
| TEST | ( | NavState | , |
| ExpmapDerivative1 | |||
| ) |
Definition at line 680 of file testNavState.cpp.
◆ TEST() [27/45]
| TEST | ( | NavState | , |
| HatAndVee | |||
| ) |
Definition at line 544 of file testNavState.cpp.
◆ TEST() [28/45]
| TEST | ( | NavState | , |
| interpolate | |||
| ) |
Definition at line 327 of file testNavState.cpp.
◆ TEST() [29/45]
| TEST | ( | NavState | , |
| Invariants | |||
| ) |
Definition at line 713 of file testNavState.cpp.
◆ TEST() [30/45]
Definition at line 256 of file testNavState.cpp.
◆ TEST() [31/45]
| TEST | ( | NavState | , |
| InverseDerivatives | |||
| ) |
Definition at line 281 of file testNavState.cpp.
◆ TEST() [32/45]
| TEST | ( | NavState | , |
| LieGroupDerivatives | |||
| ) |
Definition at line 728 of file testNavState.cpp.
◆ TEST() [33/45]
| TEST | ( | NavState | , |
| LogmapDerivative | |||
| ) |
Definition at line 696 of file testNavState.cpp.
◆ TEST() [34/45]
| TEST | ( | NavState | , |
| Manifold | |||
| ) |
Definition at line 139 of file testNavState.cpp.
◆ TEST() [35/45]
| TEST | ( | NavState | , |
| manifold_expmap | |||
| ) |
Definition at line 636 of file testNavState.cpp.
◆ TEST() [36/45]
| TEST | ( | NavState | , |
| Position | |||
| ) |
Definition at line 106 of file testNavState.cpp.
◆ TEST() [37/45]
| TEST | ( | NavState | , |
| ) |
Definition at line 435 of file testNavState.cpp.
◆ TEST() [38/45]
| TEST | ( | NavState | , |
| Retract_first_order | |||
| ) |
Definition at line 449 of file testNavState.cpp.
◆ TEST() [39/45]
| TEST | ( | NavState | , |
| Retract_LocalCoordinates | |||
| ) |
Definition at line 601 of file testNavState.cpp.
◆ TEST() [40/45]
| TEST | ( | NavState | , |
| retract_localCoordinates | |||
| ) |
Definition at line 610 of file testNavState.cpp.
◆ TEST() [41/45]
| TEST | ( | NavState | , |
| retract_localCoordinates2 | |||
| ) |
Definition at line 625 of file testNavState.cpp.
◆ TEST() [42/45]
| TEST | ( | NavState | , |
| RetractExpmap | |||
| ) |
Definition at line 466 of file testNavState.cpp.
◆ TEST() [43/45]
| TEST | ( | NavState | , |
| Stream | |||
| ) |
Definition at line 421 of file testNavState.cpp.
◆ TEST() [44/45]
| TEST | ( | NavState | , |
| subgroups | |||
| ) |
Definition at line 650 of file testNavState.cpp.
◆ TEST() [45/45]
| TEST | ( | NavState | , |
| Velocity | |||
| ) |
Definition at line 117 of file testNavState.cpp.
◆ V()
|
static |
◆ V2()
|
static |
Variable Documentation
◆ coriolis
| std::function<Vector9(const NavState&, const bool&)> coriolis |
Definition at line 334 of file testNavState.cpp.
◆ dt
|
static |
Definition at line 333 of file testNavState.cpp.
◆ kAttitude
|
static |
Definition at line 35 of file testNavState.cpp.
◆ kIdentity
|
static |
Definition at line 39 of file testNavState.cpp.
◆ kPose
◆ kState1
◆ kZeroXi
|
static |
Definition at line 43 of file testNavState.cpp.
◆ R
|
static |
Definition at line 47 of file testNavState.cpp.