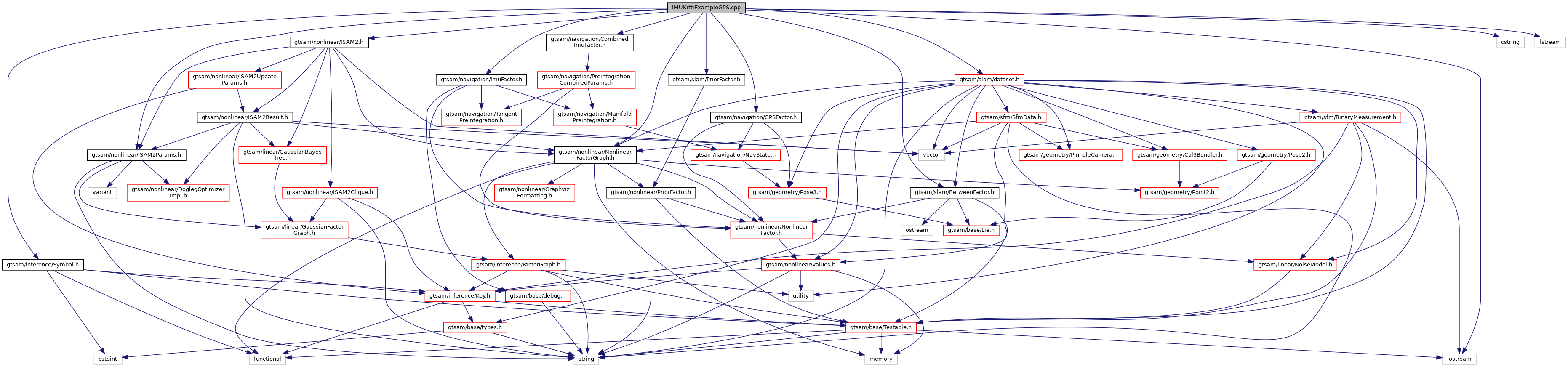
#include <gtsam/inference/Symbol.h>#include <gtsam/navigation/CombinedImuFactor.h>#include <gtsam/navigation/GPSFactor.h>#include <gtsam/navigation/ImuFactor.h>#include <gtsam/nonlinear/ISAM2.h>#include <gtsam/nonlinear/ISAM2Params.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/slam/PriorFactor.h>#include <gtsam/slam/dataset.h>#include <cstring>#include <fstream>#include <iostream>
Include dependency graph for IMUKittiExampleGPS.cpp:
Go to the source code of this file.
Classes | |
| struct | GpsMeasurement |
| struct | ImuMeasurement |
| struct | KittiCalibration |
Functions | |
| void | loadKittiData (KittiCalibration &kitti_calibration, vector< ImuMeasurement > &imu_measurements, vector< GpsMeasurement > &gps_measurements) |
| int | main (int argc, char *argv[]) |
Variables | |
| const string | output_filename = "IMUKittiExampleGPSResults.csv" |
Function Documentation
◆ loadKittiData()
| void loadKittiData | ( | KittiCalibration & | kitti_calibration, |
| vector< ImuMeasurement > & | imu_measurements, | ||
| vector< GpsMeasurement > & | gps_measurements | ||
| ) |
Definition at line 72 of file IMUKittiExampleGPS.cpp.
◆ main()
Main loop: (1) we read the measurements (2) we create the corresponding factors in the graph (3) we solve the graph to obtain and optimal estimate of robot trajectory
Definition at line 156 of file IMUKittiExampleGPS.cpp.
Variable Documentation
◆ output_filename
| const string output_filename = "IMUKittiExampleGPSResults.csv" |
Definition at line 70 of file IMUKittiExampleGPS.cpp.