Provides overrides of canTransform() that can be interrupted. Normally, canTransform() waits until transform is available, timeout is reached (which may be never in paused simulation), time jumps backwards or ros::ok() returns false. This buffer adds another option of interrupting the call. It also allows "wrapping around" another buffer that does not support this interruptibility and add this ability to it. More...
#include <interruptible_buffer.h>
Public Member Functions | |
| ::std::string | allFramesAsString () const |
| A way to see what frames have been cached. Useful for debugging. More... | |
| ::std::string | allFramesAsYAML () const |
| Backwards compatibility for #84. More... | |
| ::std::string | allFramesAsYAML (double current_time) const |
| A way to see what frames have been cached in yaml format. Useful for debugging tools. More... | |
| bool | canTransform (const ::std::string &target_frame, const ::ros::Time &target_time, const ::std::string &source_frame, const ::ros::Time &source_time, const ::std::string &fixed_frame, ::ros::Duration timeout) const |
| Test if a transform is possible. More... | |
| bool | canTransform (const ::std::string &target_frame, const ::ros::Time &target_time, const ::std::string &source_frame, const ::ros::Time &source_time, const ::std::string &fixed_frame, ::ros::Duration timeout, ::std::string *errstr) const override |
| bool | canTransform (const ::std::string &target_frame, const ::ros::Time &target_time, const ::std::string &source_frame, const ::ros::Time &source_time, const ::std::string &fixed_frame, ::std::string *error_msg=nullptr) const |
| Test if a transform is possible. More... | |
| bool | canTransform (const ::std::string &target_frame, const ::std::string &source_frame, const ::ros::Time &time, ::ros::Duration timeout) const |
| Test if a transform is possible. More... | |
| bool | canTransform (const ::std::string &target_frame, const ::std::string &source_frame, const ::ros::Time &time, ::ros::Duration timeout, ::std::string *errstr) const override |
| bool | canTransform (const ::std::string &target_frame, const ::std::string &source_frame, const ::ros::Time &time, ::std::string *error_msg=nullptr) const |
| Test if a transform is possible. More... | |
| void | clear () |
| Clear all data. More... | |
| ::ros::Duration | getCacheLength () |
| Get the duration over which this transformer will cache. More... | |
| ::tf2::BufferCore & | getRawBuffer () |
| Get the raw tf2::BufferCore that actually stores the transforms. More... | |
| const ::tf2::BufferCore & | getRawBuffer () const |
| Get the raw tf2::BufferCore that actually stores the transforms. More... | |
| InterruptibleTFBuffer (const ::ros::Duration &cacheTime={::tf2::BufferCore::DEFAULT_CACHE_TIME, 0}) | |
| Create the buffer. More... | |
| InterruptibleTFBuffer (const ::std::shared_ptr<::tf2::BufferCore > &parentBuffer) | |
| Create the buffer that relays lookups to the given parentBuffer and adds the interruptible behavior to it. Cache duration is the same as in parentBuffer. Only getCacheLength(), canTransform() and lookupTransform() methods are valid on this buffer in this mode. Any modifications/tf listeners should be done on the parent buffer. More... | |
| ::geometry_msgs::TransformStamped | lookupTransform (const ::std::string &target_frame, const ::ros::Time &target_time, const ::std::string &source_frame, const ::ros::Time &source_time, const ::std::string &fixed_frame) const |
| Get the transform between two frames by frame ID assuming fixed frame. More... | |
| ::geometry_msgs::TransformStamped | lookupTransform (const ::std::string &target_frame, const ::ros::Time &target_time, const ::std::string &source_frame, const ::ros::Time &source_time, const ::std::string &fixed_frame, const ::ros::Duration timeout) const override |
| ::geometry_msgs::TransformStamped | lookupTransform (const ::std::string &target_frame, const ::std::string &source_frame, const ::ros::Time &time) const |
| Get the transform between two frames by frame ID. More... | |
| ::geometry_msgs::TransformStamped | lookupTransform (const ::std::string &target_frame, const ::std::string &source_frame, const ::ros::Time &time, const ::ros::Duration timeout) const override |
| bool | ok () const override |
| Whether it is OK to continue. If false, all pending lookups should stop as soon as possible. More... | |
| virtual void | requestStop () |
Request all pending lookups to stop. After calling this, ok() should return false. More... | |
| bool | setCanTransformPollingScale (double scale) |
Set the scale by which canTransform() timeout is multiplied to determine the transform polling rate. More... | |
| bool | setMinPollingDuration (const ::ros::Duration &duration) |
| Set minimum duration of a pause between two transform polls. More... | |
| bool | setTransform (const ::geometry_msgs::TransformStamped &transform, const ::std::string &authority, bool is_static=false) |
| Add transform information to the tf data structure. More... | |
| template<class A , class B > | |
| B & | transform (const A &in, B &out, const ::std::string &target_frame, ::ros::Duration timeout={0, 0}) const |
| Transform an input into the target frame and convert to a specified output type. It is templated on two types: the type of the input object and the type of the transformed output. For example, the template types could be Transform, Pose, Vector, or Quaternion messages type (as defined in geometry_msgs). The function will calculate the transformation and then convert the result into the specified output type. Compilation will fail if a known conversion does not exist bewteen the two template parameters. More... | |
| template<class A , class B > | |
| B & | transform (const A &in, B &out, const ::std::string &target_frame, const ::ros::Time &target_time, const ::std::string &fixed_frame, ::ros::Duration timeout={0, 0}) const |
| Transform an input into the target frame and convert to a specified output type (advanced). It is templated on two types: the type of the input object and the type of the transformed output. For example, the template type could be a Transform, Pose, Vector, or Quaternion message type (as defined in geometry_msgs). The function will calculate the transformation and then convert the result into the specified output type. Compilation will fail if a known conversion does not exist bewteen the two template parameters. This function follows the advanced API, which allows transforming between different time points, and specifying a fixed frame that does not varying in time. More... | |
| template<class T > | |
| T | transform (const T &in, const ::std::string &target_frame, ::ros::Duration timeout={0, 0}) const |
| Transform an input into the target frame. This function is templated and can take as input any valid mathematical object that tf knows how to apply a transform to, by way of the templated math conversions interface. For example, the template type could be a Transform, Pose, Vector, or Quaternion message type (as defined in geometry_msgs). More... | |
| template<class T > | |
| T | transform (const T &in, const ::std::string &target_frame, const ::ros::Time &target_time, const ::std::string &fixed_frame, ::ros::Duration timeout={0, 0}) const |
| Transform an input into the target frame (advanced). This function is templated and can take as input any valid mathematical object that tf knows how to apply a transform to, by way of the templated math conversions interface. For example, the template type could be a Transform, Pose, Vector, or Quaternion message type (as defined in geometry_msgs). This function follows the advanced API, which allows transforming between different time points, and specifying a fixed frame that does not varying in time. More... | |
| template<class T > | |
| T & | transform (const T &in, T &out, const ::std::string &target_frame, ::ros::Duration timeout={0, 0}) const |
| Transform an input into the target frame. This function is templated and can take as input any valid mathematical object that tf knows how to apply a transform to, by way of the templated math conversions interface. For example, the template type could be a Transform, Pose, Vector, or Quaternion message type (as defined in geometry_msgs). More... | |
| template<class T > | |
| T & | transform (const T &in, T &out, const ::std::string &target_frame, const ::ros::Time &target_time, const ::std::string &fixed_frame, ::ros::Duration timeout={0, 0}) const |
| Transform an input into the target frame (advanced). This function is templated and can take as input any valid mathematical object that tf knows how to apply a transform to, by way of the templated math conversions interface. For example, the template type could be a Transform, Pose, Vector, or Quaternion message type (as defined in geometry_msgs). This function follows the advanced API, which allows transforming between different time points, and specifying a fixed frame that does not varying in time. More... | |
| ~InterruptibleTFBuffer () override | |
Destroys the class. Waits until a running canTransform() call is finished. More... | |
 Public Member Functions inherited from cras::InterruptibleSleepInterface Public Member Functions inherited from cras::InterruptibleSleepInterface | |
| InterruptibleSleepInterface () | |
| virtual bool | sleep (const ::ros::Duration &duration) const |
Sleep for the given duration or until ok() returns false. More... | |
| virtual | ~InterruptibleSleepInterface () |
Destroy the object waiting for a pending sleep() call to finish. More... | |
Protected Attributes | |
| double | canTransformPollingScale {0.01} |
canTransform() timeout is multiplied by this scale and polling for the transform is done in these time steps. More... | |
| ::ros::Duration | minPollingDuration {0, 1000000} |
| Minimum duration of a pause between two transform polls. If timeout * canTransformPollingScale would be smaller than this value, this value will be used instead to prevent too frequent queries. More... | |
| const ::std::shared_ptr<::tf2::BufferCore > | parentBuffer {nullptr} |
| If not null, this class relays all lookups to parentBuffer. More... | |
| Protected Attributes inherited from cras::InterruptibleSleepInterface | |
| ::ros::WallDuration | pollDuration {0, 1000000} |
How long to wait between querying the ok() status and other conditions. More... | |
Private Attributes | |
| mutable ::cras::ReverseSemaphore | callbackSemaphore |
| Reverse semaphore guarding that the object is not destroyed before all pending callbacks finish. At the start of each callback, the semaphore is increased, and at the end of the callback, it is decreased. The destructor of this class will block until the semaphore reaches zero. More... | |
| const ::std::shared_ptr<::cras::InterruptibleTFBuffer > | interruptibleParentBuffer {nullptr} |
| If parentBuffer is set and it is an InterruptibleTFBuffer, its dynamic cast to this type is stored here. More... | |
| bool | isOk {true} |
True until requestStop() is called. More... | |
Additional Inherited Members | |
| Protected Types inherited from tf2::BufferCore | |
| typedef boost::function< void(TransformableRequestHandle request_handle, const std::string &target_frame, const std::string &source_frame, ros::Time time, TransformableResult result)> | TransformableCallback |
| Protected Member Functions inherited from tf2_ros::Buffer | |
| Buffer (ros::Duration cache_time=ros::Duration(BufferCore::DEFAULT_CACHE_TIME), bool debug=false) | |
| virtual bool | canTransform (const std::string &target_frame, const ros::Time &target_time, const std::string &source_frame, const ros::Time &source_time, const std::string &fixed_frame, const ros::Duration timeout, std::string *errstr=NULL) const |
| virtual bool | canTransform (const std::string &target_frame, const std::string &source_frame, const ros::Time &target_time, const ros::Duration timeout, std::string *errstr=NULL) const |
| virtual geometry_msgs::TransformStamped | lookupTransform (const std::string &target_frame, const ros::Time &target_time, const std::string &source_frame, const ros::Time &source_time, const std::string &fixed_frame, const ros::Duration timeout) const |
| virtual geometry_msgs::TransformStamped | lookupTransform (const std::string &target_frame, const std::string &source_frame, const ros::Time &time, const ros::Duration timeout) const |
| Protected Member Functions inherited from tf2_ros::BufferInterface | |
| B & | transform (const A &in, B &out, const std::string &target_frame, const ros::Time &target_time, const std::string &fixed_frame, ros::Duration timeout=ros::Duration(0.0)) const |
| B & | transform (const A &in, B &out, const std::string &target_frame, ros::Duration timeout=ros::Duration(0.0)) const |
| T | transform (const T &in, const std::string &target_frame, const ros::Time &target_time, const std::string &fixed_frame, ros::Duration timeout=ros::Duration(0.0)) const |
| T | transform (const T &in, const std::string &target_frame, ros::Duration timeout=ros::Duration(0.0)) const |
| T & | transform (const T &in, T &out, const std::string &target_frame, const ros::Time &target_time, const std::string &fixed_frame, ros::Duration timeout=ros::Duration(0.0)) const |
| T & | transform (const T &in, T &out, const std::string &target_frame, ros::Duration timeout=ros::Duration(0.0)) const |
| Protected Member Functions inherited from tf2::BufferCore | |
| boost::signals2::connection | _addTransformsChangedListener (boost::function< void(void)> callback) |
| std::string | _allFramesAsDot () const |
| std::string | _allFramesAsDot (double current_time) const |
| void | _chainAsVector (const std::string &target_frame, ros::Time target_time, const std::string &source_frame, ros::Time source_time, const std::string &fixed_frame, std::vector< std::string > &output) const |
| bool | _frameExists (const std::string &frame_id_str) const |
| void | _getFrameStrings (std::vector< std::string > &ids) const |
| int | _getLatestCommonTime (CompactFrameID target_frame, CompactFrameID source_frame, ros::Time &time, std::string *error_string) const |
| bool | _getParent (const std::string &frame_id, ros::Time time, std::string &parent) const |
| CompactFrameID | _lookupFrameNumber (const std::string &frameid_str) const |
| CompactFrameID | _lookupOrInsertFrameNumber (const std::string &frameid_str) |
| void | _removeTransformsChangedListener (boost::signals2::connection c) |
| CompactFrameID | _validateFrameId (const char *function_name_arg, const std::string &frame_id) const |
| TransformableCallbackHandle | addTransformableCallback (const TransformableCallback &cb) |
| TransformableRequestHandle | addTransformableRequest (TransformableCallbackHandle handle, const std::string &target_frame, const std::string &source_frame, ros::Time time) |
| std::string | allFramesAsString () const |
| std::string | allFramesAsYAML () const |
| std::string | allFramesAsYAML (double current_time) const |
| BufferCore (ros::Duration cache_time_=ros::Duration(DEFAULT_CACHE_TIME)) | |
| void | cancelTransformableRequest (TransformableRequestHandle handle) |
| bool | canTransform (const std::string &target_frame, const ros::Time &target_time, const std::string &source_frame, const ros::Time &source_time, const std::string &fixed_frame, std::string *error_msg=NULL) const |
| bool | canTransform (const std::string &target_frame, const std::string &source_frame, const ros::Time &time, std::string *error_msg=NULL) const |
| void | clear () |
| ros::Duration | getCacheLength () |
| bool | isUsingDedicatedThread () const |
| geometry_msgs::TransformStamped | lookupTransform (const std::string &target_frame, const ros::Time &target_time, const std::string &source_frame, const ros::Time &source_time, const std::string &fixed_frame) const |
| geometry_msgs::TransformStamped | lookupTransform (const std::string &target_frame, const std::string &source_frame, const ros::Time &time) const |
| void | removeTransformableCallback (TransformableCallbackHandle handle) |
| bool | setTransform (const geometry_msgs::TransformStamped &transform, const std::string &authority, bool is_static=false) |
| void | setUsingDedicatedThread (bool value) |
| virtual | ~BufferCore (void) |
| Protected Member Functions inherited from cras::InterruptibleSleepInterface | |
| InterruptibleSleepInterface () | |
| virtual bool | sleep (const ::ros::Duration &duration) const |
Sleep for the given duration or until ok() returns false. More... | |
| virtual | ~InterruptibleSleepInterface () |
Destroy the object waiting for a pending sleep() call to finish. More... | |
| Static Protected Attributes inherited from tf2::BufferCore | |
| static const int | DEFAULT_CACHE_TIME |
| static const uint32_t | MAX_GRAPH_DEPTH |
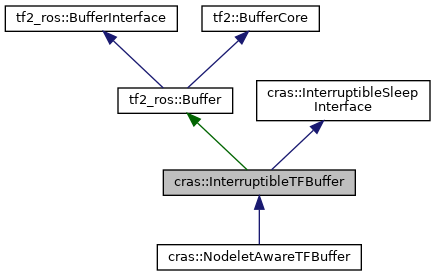
Detailed Description
Provides overrides of canTransform() that can be interrupted. Normally, canTransform() waits until transform is available, timeout is reached (which may be never in paused simulation), time jumps backwards or ros::ok() returns false. This buffer adds another option of interrupting the call. It also allows "wrapping around" another buffer that does not support this interruptibility and add this ability to it.
- Note
- In the "wrapping around" mode, do not call any other functions than canTransform() and lookupTransform(). Other functions will return wrong results.
- The buffer is partly concurrent. This means canTransform() and lookupTransform() calls can be interleaved, but in the end all of them share the same tf2::BufferCore which locks the frames mutex in canTransform()/lookupTransform(). But they access the BufferCore only from time to time in some polling intervals, so concurrency should be good in the end.
- The destructor of this class does not finish until no canTransform() or lookupTransform() call is being executed. Call requestStop() to instruct the buffer to reject any new requests and finish the ongoing ones as soon as possible, most probably resulting in failures.
Definition at line 42 of file interruptible_buffer.h.
Constructor & Destructor Documentation
◆ InterruptibleTFBuffer() [1/2]
|
explicit |
Create the buffer.
- Parameters
-
[in] cacheTime How long to keep a history of transforms
◆ InterruptibleTFBuffer() [2/2]
|
explicit |
Create the buffer that relays lookups to the given parentBuffer and adds the interruptible behavior to it. Cache duration is the same as in parentBuffer. Only getCacheLength(), canTransform() and lookupTransform() methods are valid on this buffer in this mode. Any modifications/tf listeners should be done on the parent buffer.
- Parameters
-
[in] parentBuffer The buffer to relay lookups to.
◆ ~InterruptibleTFBuffer()
|
override |
Destroys the class. Waits until a running canTransform() call is finished.
Member Function Documentation
◆ allFramesAsString()
| ::std::string cras::InterruptibleTFBuffer::allFramesAsString | ( | ) | const |
A way to see what frames have been cached. Useful for debugging.
◆ allFramesAsYAML() [1/2]
| ::std::string cras::InterruptibleTFBuffer::allFramesAsYAML | ( | ) | const |
Backwards compatibility for #84.
◆ allFramesAsYAML() [2/2]
| ::std::string cras::InterruptibleTFBuffer::allFramesAsYAML | ( | double | current_time | ) | const |
A way to see what frames have been cached in yaml format. Useful for debugging tools.
◆ canTransform() [1/6]
| bool cras::InterruptibleTFBuffer::canTransform | ( | const ::std::string & | target_frame, |
| const ::ros::Time & | target_time, | ||
| const ::std::string & | source_frame, | ||
| const ::ros::Time & | source_time, | ||
| const ::std::string & | fixed_frame, | ||
| ::ros::Duration | timeout | ||
| ) | const |
Test if a transform is possible.
- Parameters
-
[in] target_frame The frame into which to transform. [in] target_time The time into which to transform. [in] source_frame The frame from which to transform. [in] source_time The time from which to transform. [in] fixed_frame The frame in which to treat the transform as constant in time. [in] timeout How long to block before failing.
- Returns
- True if the transform is possible, false otherwise.
◆ canTransform() [2/6]
|
override |
◆ canTransform() [3/6]
| bool cras::InterruptibleTFBuffer::canTransform | ( | const ::std::string & | target_frame, |
| const ::ros::Time & | target_time, | ||
| const ::std::string & | source_frame, | ||
| const ::ros::Time & | source_time, | ||
| const ::std::string & | fixed_frame, | ||
| ::std::string * | error_msg = nullptr |
||
| ) | const |
Test if a transform is possible.
- Parameters
-
[in] target_frame The frame into which to transform [in] target_time The time into which to transform [in] source_frame The frame from which to transform [in] source_time The time from which to transform [in] fixed_frame The frame in which to treat the transform as constant in time [out] error_msg A pointer to a string which will be filled with why the transform failed, if not NULL.
- Returns
- True if the transform is possible, false otherwise.
◆ canTransform() [4/6]
| bool cras::InterruptibleTFBuffer::canTransform | ( | const ::std::string & | target_frame, |
| const ::std::string & | source_frame, | ||
| const ::ros::Time & | time, | ||
| ::ros::Duration | timeout | ||
| ) | const |
Test if a transform is possible.
- Parameters
-
[in] target_frame The frame into which to transform. [in] source_frame The frame from which to transform. [in] time The time at which to transform. [in] timeout How long to block before failing.
- Returns
- True if the transform is possible, false otherwise.
◆ canTransform() [5/6]
|
override |
◆ canTransform() [6/6]
| bool cras::InterruptibleTFBuffer::canTransform | ( | const ::std::string & | target_frame, |
| const ::std::string & | source_frame, | ||
| const ::ros::Time & | time, | ||
| ::std::string * | error_msg = nullptr |
||
| ) | const |
Test if a transform is possible.
- Parameters
-
[in] target_frame The frame into which to transform [in] source_frame The frame from which to transform [in] time The time at which to transform [out] error_msg A pointer to a string which will be filled with why the transform failed, if not NULL.
- Returns
- True if the transform is possible, false otherwise.
◆ clear()
| void cras::InterruptibleTFBuffer::clear | ( | ) |
Clear all data.
◆ getCacheLength()
| ::ros::Duration cras::InterruptibleTFBuffer::getCacheLength | ( | ) |
Get the duration over which this transformer will cache.
◆ getRawBuffer() [1/2]
| ::tf2::BufferCore& cras::InterruptibleTFBuffer::getRawBuffer | ( | ) |
Get the raw tf2::BufferCore that actually stores the transforms.
- Returns
- The raw buffer.
◆ getRawBuffer() [2/2]
| const ::tf2::BufferCore& cras::InterruptibleTFBuffer::getRawBuffer | ( | ) | const |
Get the raw tf2::BufferCore that actually stores the transforms.
- Returns
- The raw buffer.
◆ lookupTransform() [1/4]
| ::geometry_msgs::TransformStamped cras::InterruptibleTFBuffer::lookupTransform | ( | const ::std::string & | target_frame, |
| const ::ros::Time & | target_time, | ||
| const ::std::string & | source_frame, | ||
| const ::ros::Time & | source_time, | ||
| const ::std::string & | fixed_frame | ||
| ) | const |
Get the transform between two frames by frame ID assuming fixed frame.
- Parameters
-
[in] target_frame The frame to which data should be transformed [in] target_time The time to which the data should be transformed. (0 will get the latest) [in] source_frame The frame where the data originated [in] source_time The time at which the source_frame should be evaluated. (0 will get the latest) [in] fixed_frame The frame in which to assume the transform is constant in time.
- Returns
- The transform between the frames.
◆ lookupTransform() [2/4]
|
override |
◆ lookupTransform() [3/4]
| ::geometry_msgs::TransformStamped cras::InterruptibleTFBuffer::lookupTransform | ( | const ::std::string & | target_frame, |
| const ::std::string & | source_frame, | ||
| const ::ros::Time & | time | ||
| ) | const |
Get the transform between two frames by frame ID.
- Parameters
-
[in] target_frame The frame to which data should be transformed [in] source_frame The frame where the data originated [in] time The time at which the value of the transform is desired. (0 will get the latest)
- Returns
- The transform between the frames.
◆ lookupTransform() [4/4]
|
override |
◆ ok()
|
overridevirtual |
Whether it is OK to continue. If false, all pending lookups should stop as soon as possible.
- Returns
- Whether it is OK to continue.
Reimplemented from cras::InterruptibleSleepInterface.
◆ requestStop()
|
virtual |
Request all pending lookups to stop. After calling this, ok() should return false.
◆ setCanTransformPollingScale()
| bool cras::InterruptibleTFBuffer::setCanTransformPollingScale | ( | double | scale | ) |
Set the scale by which canTransform() timeout is multiplied to determine the transform polling rate.
- Parameters
-
scale The scale to set. Must be between 0 and 1.
- Returns
- Whether the given scale was set. Returns false if an invalid scale was provided.
◆ setMinPollingDuration()
| bool cras::InterruptibleTFBuffer::setMinPollingDuration | ( | const ::ros::Duration & | duration | ) |
Set minimum duration of a pause between two transform polls.
- Parameters
-
[in] duration The minimum duration. It has to be positive.
- Returns
- Whether the given duration is valid and was set.
◆ setTransform()
| bool cras::InterruptibleTFBuffer::setTransform | ( | const ::geometry_msgs::TransformStamped & | transform, |
| const ::std::string & | authority, | ||
| bool | is_static = false |
||
| ) |
Add transform information to the tf data structure.
- Parameters
-
[in] transform The transform to store [in] authority The source of the information for this transform [in] is_static Record this transform as a static transform. It will be good across all time. (This cannot be changed after the first call.)
- Returns
- True unless an error occurred.
◆ transform() [1/6]
|
inline |
Transform an input into the target frame and convert to a specified output type. It is templated on two types: the type of the input object and the type of the transformed output. For example, the template types could be Transform, Pose, Vector, or Quaternion messages type (as defined in geometry_msgs). The function will calculate the transformation and then convert the result into the specified output type. Compilation will fail if a known conversion does not exist bewteen the two template parameters.
- Template Parameters
-
A The type of the object to transform. B The type of the transformed output.
- Parameters
-
[in] in The object to transform [out] out The transformed output, converted to the specified type. [in] target_frame The string identifer for the frame to transform into. [in] timeout How long to wait for the target frame. Default value is zero (no blocking).
- Returns
- The transformed output, converted to the specified type.
Definition at line 200 of file interruptible_buffer.h.
◆ transform() [2/6]
|
inline |
Transform an input into the target frame and convert to a specified output type (advanced). It is templated on two types: the type of the input object and the type of the transformed output. For example, the template type could be a Transform, Pose, Vector, or Quaternion message type (as defined in geometry_msgs). The function will calculate the transformation and then convert the result into the specified output type. Compilation will fail if a known conversion does not exist bewteen the two template parameters. This function follows the advanced API, which allows transforming between different time points, and specifying a fixed frame that does not varying in time.
- Template Parameters
-
A The type of the object to transform. B The type of the transformed output.
- Parameters
-
[in] in The object to transform [in] out The transformed output, converted to the specified output type. [in] target_frame The string identifer for the frame to transform into. [in] target_time The time into which to transform [in] fixed_frame The frame in which to treat the transform as constant in time. [in] timeout How long to wait for the target frame. Default value is zero (no blocking).
- Returns
- The transformed output, converted to the specified output type.
Definition at line 272 of file interruptible_buffer.h.
◆ transform() [3/6]
|
inline |
Transform an input into the target frame. This function is templated and can take as input any valid mathematical object that tf knows how to apply a transform to, by way of the templated math conversions interface. For example, the template type could be a Transform, Pose, Vector, or Quaternion message type (as defined in geometry_msgs).
- Template Parameters
-
T The type of the object to transform.
- Parameters
-
[in] in The object to transform. [in] target_frame The string identifer for the frame to transform into. [in] timeout How long to wait for the target frame. Default value is zero (no blocking).
- Returns
- The transformed output.
Definition at line 176 of file interruptible_buffer.h.
◆ transform() [4/6]
|
inline |
Transform an input into the target frame (advanced). This function is templated and can take as input any valid mathematical object that tf knows how to apply a transform to, by way of the templated math conversions interface. For example, the template type could be a Transform, Pose, Vector, or Quaternion message type (as defined in geometry_msgs). This function follows the advanced API, which allows transforming between different time points, and specifying a fixed frame that does not varying in time.
- Template Parameters
-
T The type of the object to transform.
- Parameters
-
[in] in The object to transform [in] target_frame The string identifer for the frame to transform into. [in] target_time The time into which to transform [in] fixed_frame The frame in which to treat the transform as constant in time. [in] timeout How long to wait for the target frame. Default value is zero (no blocking).
- Returns
- The transformed output.
Definition at line 244 of file interruptible_buffer.h.
◆ transform() [5/6]
|
inline |
Transform an input into the target frame. This function is templated and can take as input any valid mathematical object that tf knows how to apply a transform to, by way of the templated math conversions interface. For example, the template type could be a Transform, Pose, Vector, or Quaternion message type (as defined in geometry_msgs).
- Template Parameters
-
T The type of the object to transform.
- Parameters
-
[in] in The object to transform [out] out The transformed output, preallocated by the caller. [in] target_frame The string identifer for the frame to transform into. [in] timeout How long to wait for the target frame. Default value is zero (no blocking).
Definition at line 159 of file interruptible_buffer.h.
◆ transform() [6/6]
|
inline |
Transform an input into the target frame (advanced). This function is templated and can take as input any valid mathematical object that tf knows how to apply a transform to, by way of the templated math conversions interface. For example, the template type could be a Transform, Pose, Vector, or Quaternion message type (as defined in geometry_msgs). This function follows the advanced API, which allows transforming between different time points, and specifying a fixed frame that does not varying in time.
- Template Parameters
-
T The type of the object to transform.
- Parameters
-
[in] in The object to transform [out] out The transformed output, preallocated by the caller. [in] target_frame The string identifer for the frame to transform into. [in] target_time The time into which to transform [in] fixed_frame The frame in which to treat the transform as constant in time. [in] timeout How long to wait for the target frame. Default value is zero (no blocking).
Definition at line 221 of file interruptible_buffer.h.
Member Data Documentation
◆ callbackSemaphore
|
private |
Reverse semaphore guarding that the object is not destroyed before all pending callbacks finish. At the start of each callback, the semaphore is increased, and at the end of the callback, it is decreased. The destructor of this class will block until the semaphore reaches zero.
Definition at line 389 of file interruptible_buffer.h.
◆ canTransformPollingScale
|
protected |
canTransform() timeout is multiplied by this scale and polling for the transform is done in these time steps.
Definition at line 373 of file interruptible_buffer.h.
◆ interruptibleParentBuffer
|
private |
If parentBuffer is set and it is an InterruptibleTFBuffer, its dynamic cast to this type is stored here.
Definition at line 384 of file interruptible_buffer.h.
◆ isOk
|
private |
True until requestStop() is called.
Definition at line 381 of file interruptible_buffer.h.
◆ minPollingDuration
|
protected |
Minimum duration of a pause between two transform polls. If timeout * canTransformPollingScale would be smaller than this value, this value will be used instead to prevent too frequent queries.
Definition at line 377 of file interruptible_buffer.h.
◆ parentBuffer
|
protected |
If not null, this class relays all lookups to parentBuffer.
Definition at line 369 of file interruptible_buffer.h.
The documentation for this class was generated from the following file: