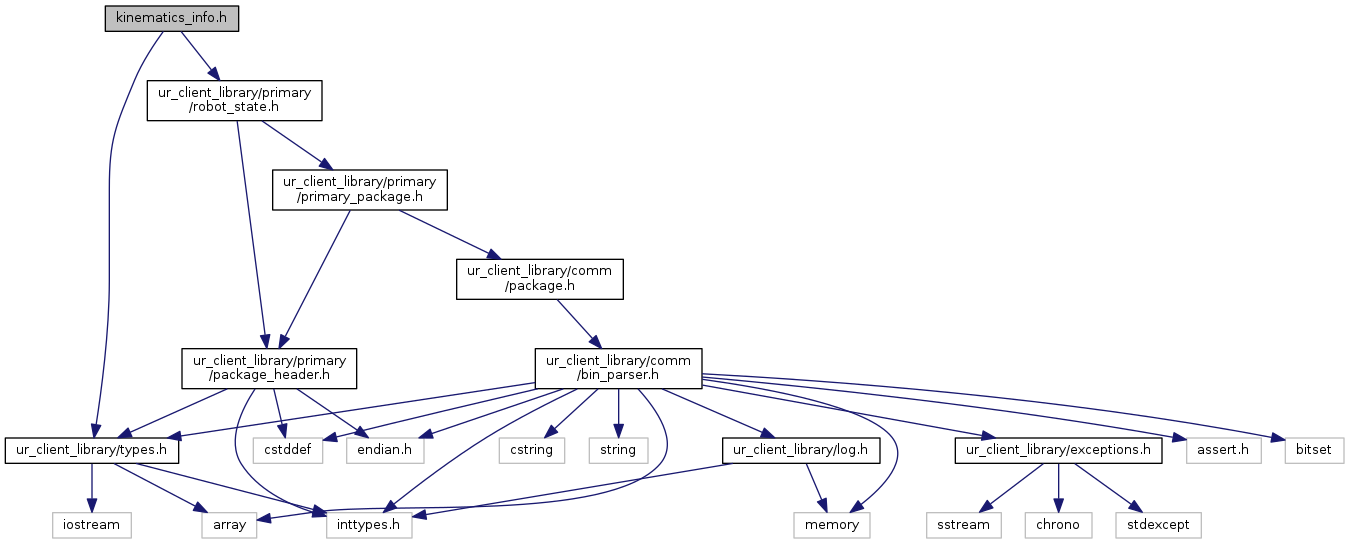
Include dependency graph for kinematics_info.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | urcl::primary_interface::KinematicsInfo |
| This messages contains information about the robot's calibration. The DH parameters are a combination between the perfect model parameters and the correction deltas as noted in the configuration files on the robot controller. More... | |
Namespaces | |
| urcl | |
| urcl::primary_interface | |
Detailed Description
- Date
- 2019-04-08
Definition in file kinematics_info.h.