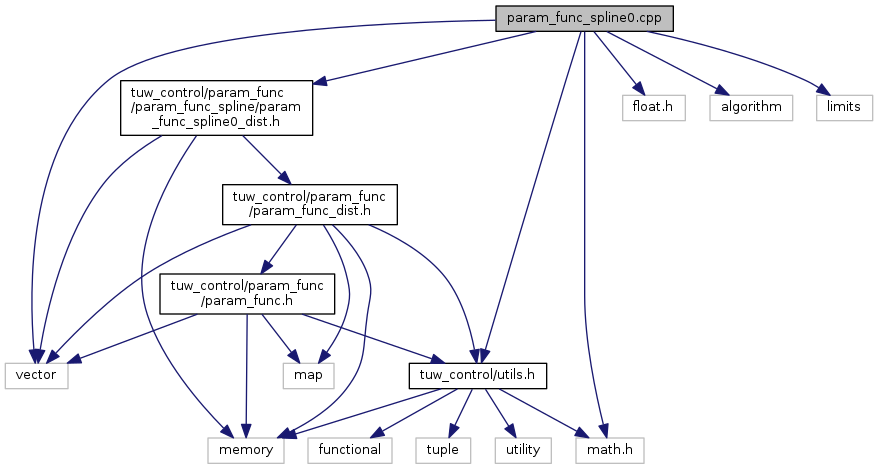
#include <tuw_control/param_func/param_func_spline/param_func_spline0_dist.h>#include <tuw_control/utils.h>#include <float.h>#include <math.h>#include <algorithm>#include <limits>#include <vector>
Include dependency graph for param_func_spline0.cpp: