#include <rtabmap/core/clams/discrete_depth_distortion_model.h>#include <rtabmap/core/SensorData.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include "rtabmap/core/RtabmapExp.h"
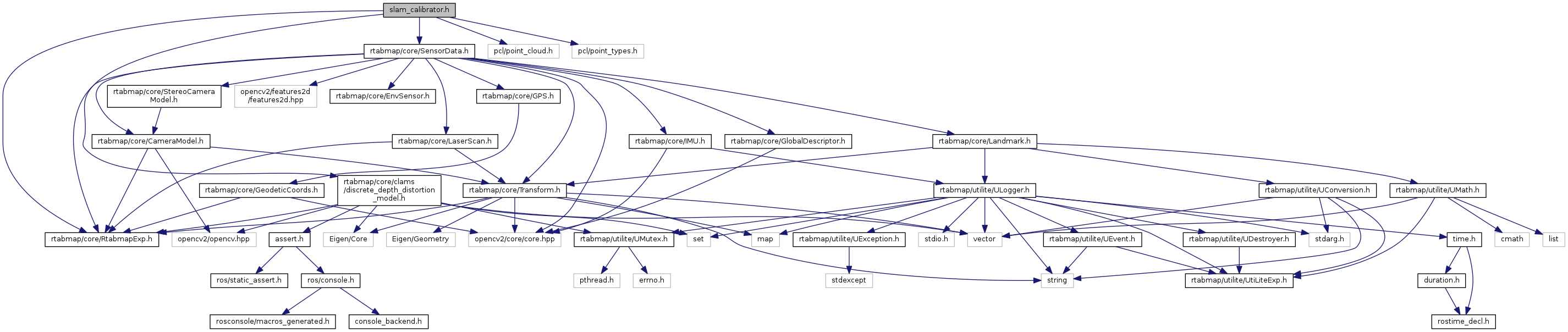
Include dependency graph for slam_calibrator.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| clams | |
Functions | |
| DiscreteDepthDistortionModel RTABMAP_EXP | clams::calibrate (const std::map< int, rtabmap::SensorData > &sequence, const std::map< int, rtabmap::Transform > &trajectory, const pcl::PointCloud< pcl::PointXYZ >::Ptr &map, double coneRadius=0.02, double coneStdevThresh=0.03) |