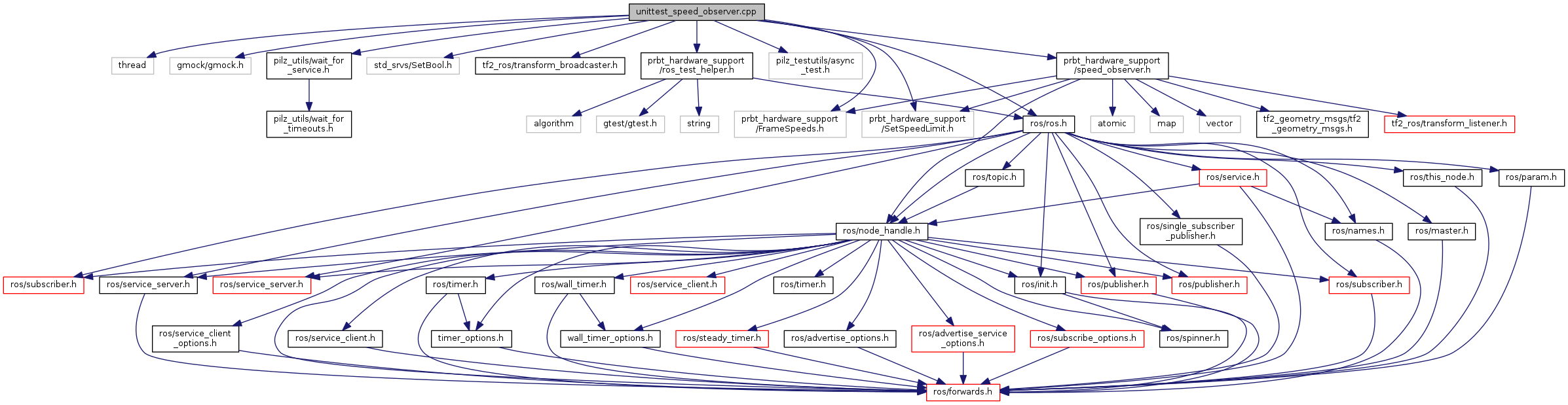
#include <thread>
#include <gmock/gmock.h>
#include <ros/ros.h>
#include <std_srvs/SetBool.h>
#include <tf2_ros/transform_broadcaster.h>
#include <pilz_utils/wait_for_service.h>
#include <pilz_testutils/async_test.h>
#include <prbt_hardware_support/FrameSpeeds.h>
#include <prbt_hardware_support/SetSpeedLimit.h>
#include <prbt_hardware_support/ros_test_helper.h>
#include <prbt_hardware_support/speed_observer.h>
Go to the source code of this file.
|
| int | main (int argc, char *argv[]) |
| |
| | speed_observer_test::MATCHER_P (RunPermittedState, x,"RunPermitted state "+std::string(negation?"is not":"is")+": "+PrintToString(x)+".") |
| |
| | speed_observer_test::MATCHER_P2 (NameAtI, i, name,"Name at index "+PrintToString(i)+std::string(negation?"is not":"is")+": "+name+".") |
| |
| | speed_observer_test::MATCHER_P2 (SpeedAtIGe, i, x,"Speed at index "+PrintToString(i)+std::string(negation?"is not":"is")+" greater or equal to"+PrintToString(x)+".") |
| |
| | speed_observer_test::MATCHER_P2 (SpeedAtILe, i, x,"Speed at index "+PrintToString(i)+std::string(negation?"is not":"is")+" less or equal to"+PrintToString(x)+".") |
| |
| | speed_observer_test::TEST_F (SpeedObserverUnitTest, testStartupAndTopic) |
| |
| | speed_observer_test::TEST_F (SpeedObserverUnitTest, testTooHighSpeed) |
| |
| | speed_observer_test::TEST_F (SpeedObserverUnitTest, testSetSpeedLimit) |
| |
| | speed_observer_test::TEST_F (SpeedObserverUnitTest, testTimeout) |
| |
| | speed_observer_test::TEST_F (SpeedObserverUnitTest, testFailingRunPermittedServiceCase) |
| |
| | speed_observer_test::TEST_F (SpeedObserverUnitTest, testSlowTfPublishing) |
| |
| int main |
( |
int |
argc, |
|
|
char * |
argv[] |
|
) |
| |