#include <thread>#include <gmock/gmock.h>#include <ros/ros.h>#include <sensor_msgs/JointState.h>#include <std_srvs/SetBool.h>#include <tf2_ros/transform_broadcaster.h>#include <pilz_testutils/async_test.h>#include <prbt_hardware_support/ros_test_helper.h>#include <prbt_hardware_support/speed_observer.h>#include <prbt_hardware_support/FrameSpeeds.h>#include <prbt_hardware_support/OperationModes.h>
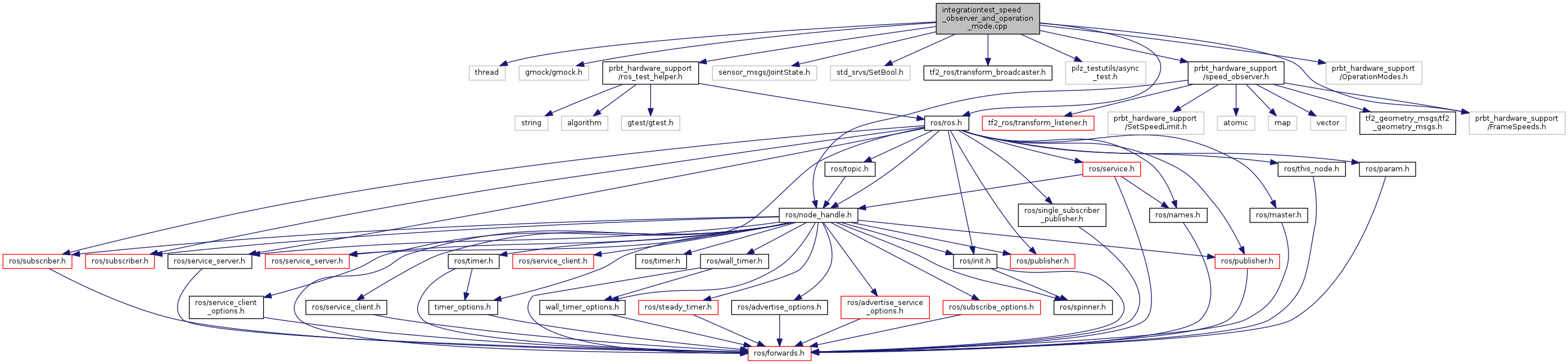
Include dependency graph for integrationtest_speed_observer_and_operation_mode.cpp:
Go to the source code of this file.
Classes | |
| class | speed_observer_test::SpeedObserverIntegrationTest |
Namespaces | |
| speed_observer_test | |
Functions | |
| int | main (int argc, char *argv[]) |
| speed_observer_test::MATCHER_P (RunPermittedState, x,"RunPermitted state "+std::string(negation?"is not":"is")+": "+PrintToString(x)+".") | |
| speed_observer_test::MATCHER_P (ContainsAllNames, names,"Names"+PrintToString(names)+std::string(negation?"are not":"are")+" in message.") | |
| speed_observer_test::TEST_F (SpeedObserverIntegrationTest, testOperationModeT1) | |
| Tests speed observer with operation mode T1. More... | |
| speed_observer_test::TEST_F (SpeedObserverIntegrationTest, testOperationModeAuto) | |
| Tests speed observer with operation mode AUTO. More... | |
| speed_observer_test::TEST_F (SpeedObserverIntegrationTest, testAdditionalTFTree) | |
| Tests speed observer with additional tf tree. More... | |
| speed_observer_test::TEST_F (SpeedObserverIntegrationTest, testRunPermittedServiceNoSuccess) | |
| Tests speed observer with RUN_PERMITTED service returning no success. More... | |
Variables | |
| static const std::string | speed_observer_test::ADDITIONAL_FRAMES_PARAM_NAME { "additional_frames" } |
| static const std::string | speed_observer_test::BARRIER_NO_STOP_HAPPENED { "BARRIER_NO_STOP_HAPPENED" } |
| static const std::string | speed_observer_test::BARRIER_NO_SVC_SUCESS { "BARRIER_NO_SVC_SUCESS" } |
| static const std::string | speed_observer_test::BARRIER_STOP_HAPPENED { "BARRIER_STOP_HAPPENED" } |
| static const std::string | speed_observer_test::BARRIER_WAIT_OUT_STOP { "BARRIER_WAIT_OUT_STOP" } |
| static const std::string | speed_observer_test::FAKE_CONTROLLER_JOINT_STATES_TOPIC_NAME { "/fake_controller_joint_states" } |
| static const std::string | speed_observer_test::FRAME_SPEEDS_TOPIC_NAME { "/frame_speeds" } |
| static const std::string | speed_observer_test::OPERATION_MODE_TOPIC { "operation_mode" } |
| static const std::string | speed_observer_test::RUN_PERMITTED_SERVICE { "run_permitted" } |
| static const std::string | speed_observer_test::SPEED_LIMIT_AUTOMATIC_PARAM_NAME { "speed_limit_automatic" } |
| static const std::string | speed_observer_test::SPEED_LIMIT_T1_PARAM_NAME { "speed_limit_t1" } |
| static const double | speed_observer_test::SQRT_2_HALF { 1 / sqrt(2) } |
| static const double | speed_observer_test::TEST_FREQUENCY { 10 } |
| static const std::string | speed_observer_test::TEST_WORLD_FRAME { "world" } |
Function Documentation
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 499 of file integrationtest_speed_observer_and_operation_mode.cpp.