#include "MotoROS.h"
Include dependency graph for StateServer.c:
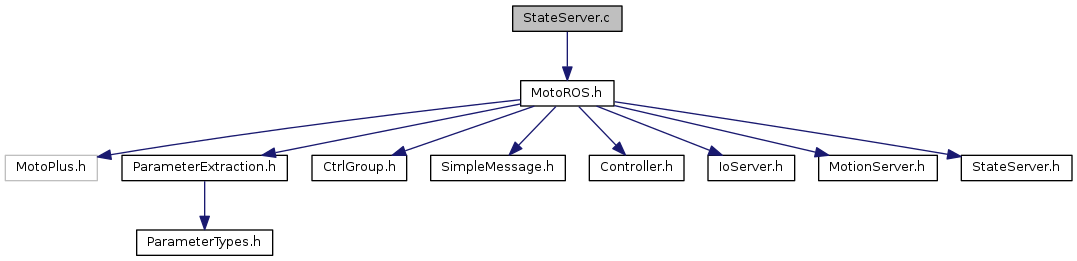
Go to the source code of this file.
Functions | |
| BOOL | Ros_StateServer_SendMsgToAllClient (Controller *controller, int connectionIndex, SimpleMsg *sendMsg, int msgSize) |
| void | Ros_StateServer_SendState (Controller *controller, int connectionIndex) |
| void | Ros_StateServer_StartNewConnection (Controller *controller, int sd) |
| void | Ros_StateServer_StopConnection (Controller *controller, int connectionIndex) |
Function Documentation
| BOOL Ros_StateServer_SendMsgToAllClient | ( | Controller * | controller, |
| int | connectionIndex, | ||
| SimpleMsg * | sendMsg, | ||
| int | msgSize | ||
| ) |
Definition at line 197 of file StateServer.c.
| void Ros_StateServer_SendState | ( | Controller * | controller, |
| int | connectionIndex | ||
| ) |
Definition at line 132 of file StateServer.c.
| void Ros_StateServer_StartNewConnection | ( | Controller * | controller, |
| int | sd | ||
| ) |
Definition at line 49 of file StateServer.c.
| void Ros_StateServer_StopConnection | ( | Controller * | controller, |
| int | connectionIndex | ||
| ) |
Definition at line 101 of file StateServer.c.