#include "MotoROS.h"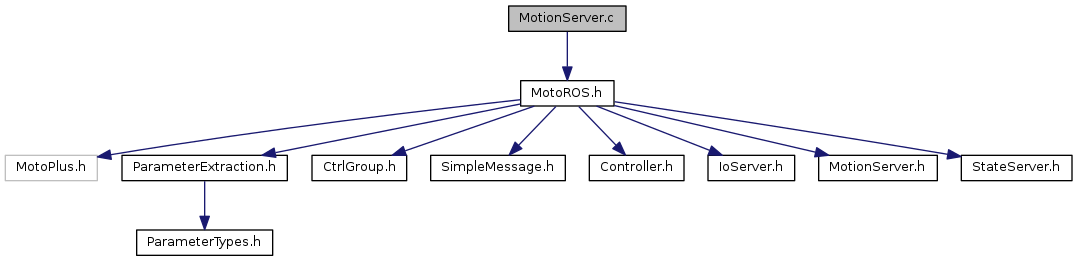
Go to the source code of this file.
Function Documentation
| BOOL Ros_MotionServer_AddPulseIncPointToQ | ( | Controller * | controller, |
| int | groupNo, | ||
| Incremental_data * | dataToEnQ | ||
| ) |
Definition at line 1487 of file MotionServer.c.
| void Ros_MotionServer_AddToIncQueueProcess | ( | Controller * | controller, |
| int | groupNo | ||
| ) |
Definition at line 1315 of file MotionServer.c.
| int Ros_MotionServer_AddTrajPointFull | ( | CtrlGroup * | ctrlGroup, |
| SmBodyJointTrajPtFull * | jointTrajData | ||
| ) |
Definition at line 1266 of file MotionServer.c.
| int Ros_MotionServer_AddTrajPointFullEx | ( | CtrlGroup * | ctrlGroup, |
| SmBodyJointTrajPtExData * | jointTrajDataEx, | ||
| int | sequence | ||
| ) |
Definition at line 1246 of file MotionServer.c.
| BOOL Ros_MotionServer_ClearQ | ( | Controller * | controller, |
| int | groupNo | ||
| ) |
Definition at line 1532 of file MotionServer.c.
| BOOL Ros_MotionServer_ClearQ_All | ( | Controller * | controller | ) |
Definition at line 1562 of file MotionServer.c.
| void Ros_MotionServer_ConvertToJointMotionData | ( | SmBodyJointTrajPtFull * | jointTrajData, |
| JointMotionData * | jointMotionData | ||
| ) |
Definition at line 1806 of file MotionServer.c.
| STATUS Ros_MotionServer_DisableEcoMode | ( | Controller * | controller | ) |
Definition at line 1833 of file MotionServer.c.
| int Ros_MotionServer_GetDhParameters | ( | Controller * | controller, |
| SimpleMsg * | replyMsg | ||
| ) |
Definition at line 1878 of file MotionServer.c.
| int Ros_MotionServer_GetExpectedByteSizeForMessageType | ( | SimpleMsg * | receiveMsg, |
| int | recvByteSize | ||
| ) |
Definition at line 248 of file MotionServer.c.
| int Ros_MotionServer_GetQueueCnt | ( | Controller * | controller, |
| int | groupNo | ||
| ) |
Definition at line 1579 of file MotionServer.c.
| BOOL Ros_MotionServer_HasDataInQueue | ( | Controller * | controller | ) |
Definition at line 1611 of file MotionServer.c.
| void Ros_MotionServer_IncMoveLoopStart | ( | Controller * | controller | ) |
Definition at line 1633 of file MotionServer.c.
| int Ros_MotionServer_InitTrajPointFull | ( | CtrlGroup * | ctrlGroup, |
| SmBodyJointTrajPtFull * | jointTrajData | ||
| ) |
Definition at line 1175 of file MotionServer.c.
| int Ros_MotionServer_InitTrajPointFullEx | ( | CtrlGroup * | ctrlGroup, |
| SmBodyJointTrajPtExData * | jointTrajDataEx, | ||
| int | sequence | ||
| ) |
Definition at line 1156 of file MotionServer.c.
| int Ros_MotionServer_JointTrajDataProcess | ( | Controller * | controller, |
| SimpleMsg * | receiveMsg, | ||
| SimpleMsg * | replyMsg | ||
| ) |
Definition at line 1071 of file MotionServer.c.
| void Ros_MotionServer_JointTrajDataToIncQueue | ( | Controller * | controller, |
| int | groupNo | ||
| ) |
Definition at line 1347 of file MotionServer.c.
| int Ros_MotionServer_JointTrajPtFullExProcess | ( | Controller * | controller, |
| SimpleMsg * | receiveMsg, | ||
| SimpleMsg * | replyMsg | ||
| ) |
Definition at line 509 of file MotionServer.c.
| int Ros_MotionServer_MotionCtrlProcess | ( | Controller * | controller, |
| SimpleMsg * | receiveMsg, | ||
| SimpleMsg * | replyMsg | ||
| ) |
Definition at line 616 of file MotionServer.c.
| void Ros_MotionServer_PrintError | ( | USHORT | err_no, |
| char * | msgPrefix | ||
| ) |
Definition at line 1825 of file MotionServer.c.
| BOOL Ros_MotionServer_ResetAlarm | ( | Controller * | controller | ) |
Definition at line 817 of file MotionServer.c.
| BOOL Ros_MotionServer_ServoPower | ( | Controller * | controller, |
| int | servoOnOff | ||
| ) |
Definition at line 762 of file MotionServer.c.
| int Ros_MotionServer_SetSelectedTool | ( | Controller * | controller, |
| SimpleMsg * | receiveMsg, | ||
| SimpleMsg * | replyMsg | ||
| ) |
Definition at line 1911 of file MotionServer.c.
| int Ros_MotionServer_SimpleMsgProcess | ( | Controller * | controller, |
| SimpleMsg * | receiveMsg, | ||
| SimpleMsg * | replyMsg | ||
| ) |
Definition at line 424 of file MotionServer.c.
| void Ros_MotionServer_StartNewConnection | ( | Controller * | controller, |
| int | sd | ||
| ) |
Definition at line 82 of file MotionServer.c.
| BOOL Ros_MotionServer_StartTrajMode | ( | Controller * | controller | ) |
Definition at line 885 of file MotionServer.c.
| void Ros_MotionServer_StopConnection | ( | Controller * | controller, |
| int | connectionIndex | ||
| ) |
Definition at line 195 of file MotionServer.c.
| BOOL Ros_MotionServer_StopMotion | ( | Controller * | controller | ) |
Definition at line 726 of file MotionServer.c.
| BOOL Ros_MotionServer_StopTrajMode | ( | Controller * | controller | ) |
Definition at line 1044 of file MotionServer.c.
| void Ros_MotionServer_WaitForSimpleMsg | ( | Controller * | controller, |
| int | connectionIndex | ||
| ) |
Definition at line 313 of file MotionServer.c.