#include "MotoROS.h"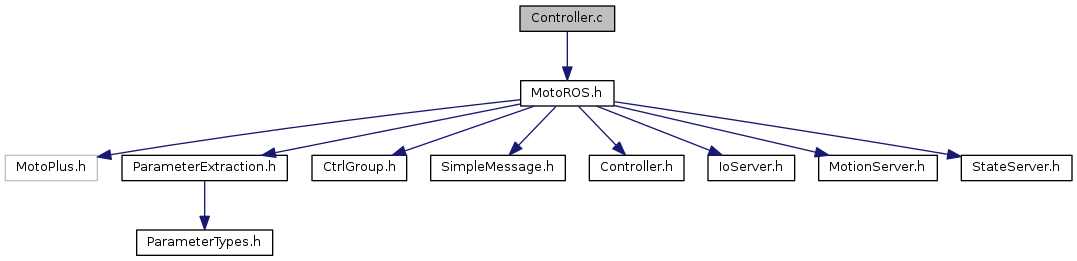
Go to the source code of this file.
Function Documentation
| void Db_Print | ( | char * | msgFormat, |
| ... | |||
| ) |
Definition at line 982 of file Controller.c.
| void motoRosAssert | ( | BOOL | mustBeTrue, |
| ROS_ASSERTION_CODE | subCodeIfFalse, | ||
| char * | msgFmtIfFalse, | ||
| ... | |||
| ) |
Definition at line 951 of file Controller.c.
| void reportVersionInfoToController | ( | ) |
Definition at line 78 of file Controller.c.
| void Ros_Controller_ConnectionServer_Start | ( | Controller * | controller | ) |
Definition at line 314 of file Controller.c.
| void Ros_Controller_ErrNo_ToString | ( | int | errNo, |
| char | errMsg[ERROR_MSG_MAX_SIZE], | ||
| int | errMsgSize | ||
| ) |
Definition at line 828 of file Controller.c.
| int Ros_Controller_GetAlarmCode | ( | ) |
Definition at line 810 of file Controller.c.
| BOOL Ros_Controller_GetIOState | ( | ULONG | signal | ) |
Definition at line 774 of file Controller.c.
| int Ros_Controller_GetNotReadySubcode | ( | Controller * | controller | ) |
Definition at line 558 of file Controller.c.
| BOOL Ros_Controller_Init | ( | Controller * | controller | ) |
Definition at line 99 of file Controller.c.
| BOOL Ros_Controller_IsAlarm | ( | Controller * | controller | ) |
Definition at line 460 of file Controller.c.
| BOOL Ros_Controller_IsEcoMode | ( | Controller * | controller | ) |
Definition at line 503 of file Controller.c.
| BOOL Ros_Controller_IsError | ( | Controller * | controller | ) |
Definition at line 468 of file Controller.c.
| BOOL Ros_Controller_IsEStop | ( | Controller * | controller | ) |
Definition at line 508 of file Controller.c.
| BOOL Ros_Controller_IsHold | ( | Controller * | controller | ) |
Definition at line 493 of file Controller.c.
| BOOL Ros_Controller_IsInMotion | ( | Controller * | controller | ) |
Definition at line 609 of file Controller.c.
| BOOL Ros_Controller_IsMotionReady | ( | Controller * | controller | ) |
Definition at line 520 of file Controller.c.
| BOOL Ros_Controller_IsOperating | ( | Controller * | controller | ) |
Definition at line 488 of file Controller.c.
| BOOL Ros_Controller_IsPflActive | ( | Controller * | controller | ) |
Definition at line 543 of file Controller.c.
| BOOL Ros_Controller_IsPlay | ( | Controller * | controller | ) |
Definition at line 473 of file Controller.c.
| BOOL Ros_Controller_IsRemote | ( | Controller * | controller | ) |
Definition at line 483 of file Controller.c.
| BOOL Ros_Controller_IsServoOn | ( | Controller * | controller | ) |
Definition at line 498 of file Controller.c.
| BOOL Ros_Controller_IsTeach | ( | Controller * | controller | ) |
Definition at line 478 of file Controller.c.
| BOOL Ros_Controller_IsValidGroupNo | ( | Controller * | controller, |
| int | groupNo | ||
| ) |
Definition at line 255 of file Controller.c.
| BOOL Ros_Controller_IsWaitingRos | ( | Controller * | controller | ) |
Definition at line 515 of file Controller.c.
| int Ros_Controller_OpenSocket | ( | int | tcpPort | ) |
Definition at line 272 of file Controller.c.
| void Ros_Controller_SetIOState | ( | ULONG | signal, |
| BOOL | status | ||
| ) |
Definition at line 793 of file Controller.c.
| void Ros_Controller_StatusInit | ( | Controller * | controller | ) |
Definition at line 431 of file Controller.c.
| BOOL Ros_Controller_StatusRead | ( | Controller * | controller, |
| USHORT | ioStatus[IO_ROBOTSTATUS_MAX] | ||
| ) |
Definition at line 687 of file Controller.c.
| int Ros_Controller_StatusToMsg | ( | Controller * | controller, |
| SimpleMsg * | sendMsg | ||
| ) |
Definition at line 656 of file Controller.c.
| BOOL Ros_Controller_StatusUpdate | ( | Controller * | controller | ) |
Definition at line 695 of file Controller.c.
| BOOL Ros_Controller_WaitInitReady | ( | Controller * | controller | ) |
Definition at line 238 of file Controller.c.
| void Ros_Sleep | ( | float | milliseconds | ) |
Definition at line 999 of file Controller.c.
| STATUS setsockopt | ( | int | s, |
| int | level, | ||
| int | optname, | ||
| char * | optval, | ||
| int | optlen | ||
| ) |