Unit tests for SO3, as a GTSAM-adapted Lie Group. More...
#include <gtsam/geometry/SO3.h>#include <gtsam/base/Testable.h>#include <gtsam/base/testLie.h>#include <CppUnitLite/TestHarness.h>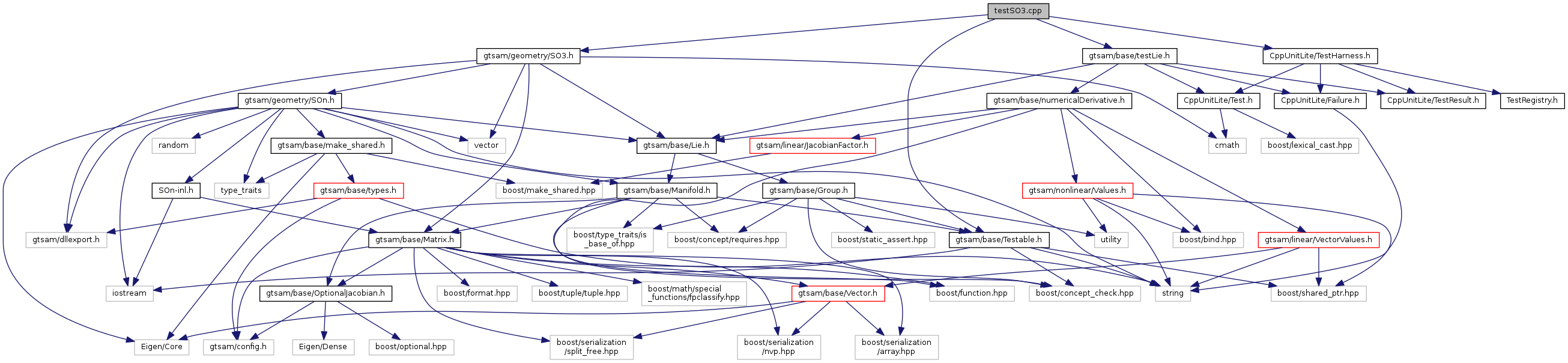
Go to the source code of this file.
Namespaces | |
| exmap_derivative | |
Functions | |
| int | main () |
| TEST (SO3, Identity) | |
| TEST (SO3, Concept) | |
| TEST (SO3, Constructors) | |
| TEST (SO3, ClosestTo) | |
| TEST (SO3, ChordalMean) | |
| TEST (SO3, Hat) | |
| TEST (SO3, Vee) | |
| TEST (SO3, Local) | |
| TEST (SO3, Retract) | |
| TEST (SO3, Logmap) | |
| TEST (SO3, Expmap) | |
| TEST (SO3, Invariants) | |
| TEST (SO3, LieGroupDerivatives) | |
| TEST (SO3, ChartDerivatives) | |
| TEST (SO3, ExpmapFunctor) | |
| TEST (SO3, ExpmapDerivative) | |
| TEST (SO3, ExpmapDerivative2) | |
| TEST (SO3, ExpmapDerivative3) | |
| TEST (SO3, ExpmapDerivative4) | |
| TEST (SO3, ExpmapDerivative5) | |
| TEST (SO3, ExpmapDerivative6) | |
| TEST (SO3, LogmapDerivative) | |
| TEST (SO3, JacobianLogmap) | |
| TEST (SO3, ApplyDexp) | |
| TEST (SO3, ApplyInvDexp) | |
| TEST (SO3, vec) | |
| TEST (Matrix, compose) | |
| Vector3 | testDexpL (const Vector3 &dw) |
| Vector3 | v2 (1, 2, 0) |
| Vector3 | v3 (1, 2, 3) |
| static const Vector3 | exmap_derivative::w (0.1, 0.27,-0.2) |
| Vector3 | z_axis (0, 0, 1) |
Variables | |
| SO3 | id |
| SO3 | R1 (Eigen::AngleAxisd(0.1, z_axis)) |
| SO3 | R2 (Eigen::AngleAxisd(0.2, z_axis)) |
Detailed Description
Unit tests for SO3, as a GTSAM-adapted Lie Group.
Definition in file testSO3.cpp.
Function Documentation
| int main | ( | void | ) |
Definition at line 380 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| Identity | |||
| ) |
Definition at line 29 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| Concept | |||
| ) |
Definition at line 39 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| Constructors | |||
| ) |
Definition at line 46 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ClosestTo | |||
| ) |
Definition at line 55 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ChordalMean | |||
| ) |
Definition at line 77 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| Hat | |||
| ) |
Definition at line 83 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| Vee | |||
| ) |
Definition at line 91 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| Local | |||
| ) |
Definition at line 100 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| Retract | |||
| ) |
Definition at line 107 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| Logmap | |||
| ) |
Definition at line 114 of file testSO3.cpp.
Definition at line 121 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| Invariants | |||
| ) |
Definition at line 128 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| LieGroupDerivatives | |||
| ) |
Definition at line 141 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ChartDerivatives | |||
| ) |
Definition at line 149 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ExpmapFunctor | |||
| ) |
Definition at line 157 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ExpmapDerivative | |||
| ) |
Definition at line 197 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ExpmapDerivative2 | |||
| ) |
Definition at line 209 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ExpmapDerivative3 | |||
| ) |
Definition at line 220 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ExpmapDerivative4 | |||
| ) |
Definition at line 231 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ExpmapDerivative5 | |||
| ) |
Definition at line 259 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ExpmapDerivative6 | |||
| ) |
Definition at line 275 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| LogmapDerivative | |||
| ) |
Definition at line 285 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| JacobianLogmap | |||
| ) |
Definition at line 295 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ApplyDexp | |||
| ) |
Definition at line 306 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| ApplyInvDexp | |||
| ) |
Definition at line 329 of file testSO3.cpp.
| TEST | ( | SO3 | , |
| vec | |||
| ) |
Definition at line 353 of file testSO3.cpp.
| TEST | ( | Matrix | , |
| compose | |||
| ) |
Definition at line 364 of file testSO3.cpp.
Definition at line 192 of file testSO3.cpp.
| Vector3 v2 | ( | 1 | , |
| 2 | , | ||
| 0 | |||
| ) |
| Vector3 v3 | ( | 1 | , |
| 2 | , | ||
| 3 | |||
| ) |
| Vector3 z_axis | ( | 0 | , |
| 0 | , | ||
| 1 | |||
| ) |
Variable Documentation
| SO3 id |
Definition at line 71 of file testSO3.cpp.
| SO3 R1(Eigen::AngleAxisd(0.1, z_axis)) |
| SO3 R2(Eigen::AngleAxisd(0.2, z_axis)) |