Unit tests for NavState. More...
#include <gtsam/navigation/NavState.h>#include <gtsam/base/TestableAssertions.h>#include <gtsam/base/numericalDerivative.h>#include <CppUnitLite/TestHarness.h>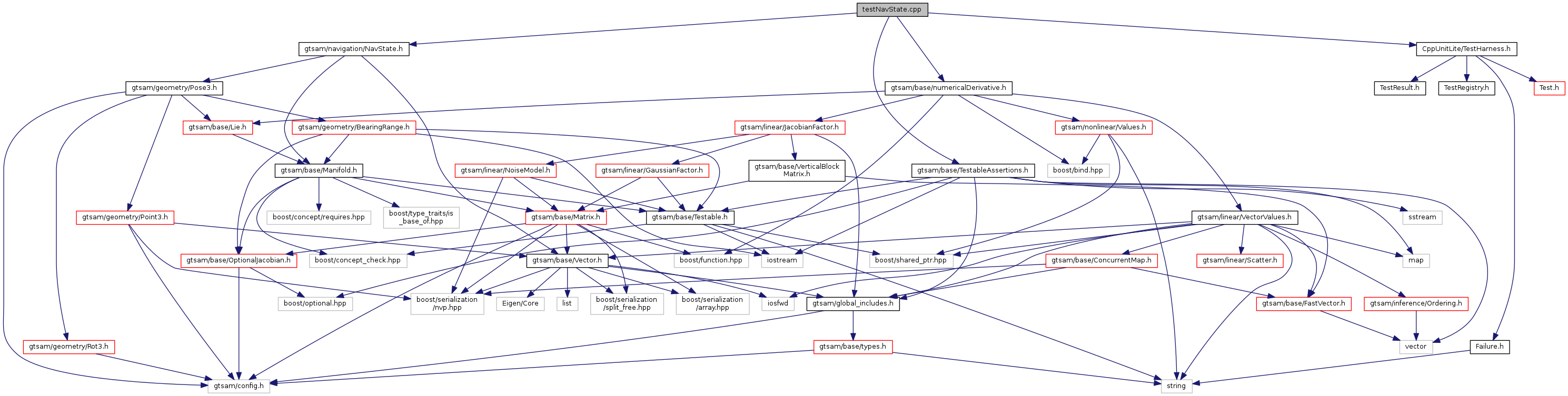
Go to the source code of this file.
Functions | |
| static const Vector3 | kGravity (0, 0, 9.81) |
| static const Vector3 | kOmegaCoriolis (0.02, 0.03, 0.04) |
| static const Point3 | kPosition (1.0, 2.0, 3.0) |
| static const Velocity3 | kVelocity (0.4, 0.5, 0.6) |
| int | main () |
| TEST (NavState, Constructor) | |
| TEST (NavState, Constructor2) | |
| TEST (NavState, Attitude) | |
| TEST (NavState, Position) | |
| TEST (NavState, Velocity) | |
| TEST (NavState, BodyVelocity) | |
| TEST (NavState, Manifold) | |
| TEST (NavState, Coriolis) | |
| TEST (NavState, Coriolis2) | |
| TEST (NavState, Coriolis3) | |
| TEST (NavState, CorrectPIM) | |
| TEST (NavState, Stream) | |
Variables | |
| boost::function< Vector9(const NavState &, const bool &)> | coriolis |
| static const double | dt = 2.0 |
| static const Rot3 | kAttitude = Rot3::RzRyRx(0.1, 0.2, 0.3) |
| static const NavState | kIdentity |
| static const Pose3 | kPose (kAttitude, kPosition) |
| static const NavState | kState1 (kAttitude, kPosition, kVelocity) |
| static const Vector9 | kZeroXi = Vector9::Zero() |
Detailed Description
Function Documentation
|
static |
|
static |
|
static |
|
static |
| int main | ( | void | ) |
Definition at line 268 of file testNavState.cpp.
| TEST | ( | NavState | , |
| Constructor | |||
| ) |
Definition at line 38 of file testNavState.cpp.
| TEST | ( | NavState | , |
| Constructor2 | |||
| ) |
Definition at line 58 of file testNavState.cpp.
| TEST | ( | NavState | , |
| Attitude | |||
| ) |
Definition at line 71 of file testNavState.cpp.
| TEST | ( | NavState | , |
| Position | |||
| ) |
Definition at line 81 of file testNavState.cpp.
| TEST | ( | NavState | , |
| Velocity | |||
| ) |
Definition at line 91 of file testNavState.cpp.
| TEST | ( | NavState | , |
| BodyVelocity | |||
| ) |
Definition at line 101 of file testNavState.cpp.
| TEST | ( | NavState | , |
| Manifold | |||
| ) |
Definition at line 111 of file testNavState.cpp.
| TEST | ( | NavState | , |
| Coriolis | |||
| ) |
Definition at line 171 of file testNavState.cpp.
| TEST | ( | NavState | , |
| Coriolis2 | |||
| ) |
Definition at line 182 of file testNavState.cpp.
| TEST | ( | NavState | , |
| Coriolis3 | |||
| ) |
Consider a massless planet with an attached nav frame at n_omega = [0 0 1]', and a body at position n_t = [1 0 0]', travelling with velocity n_v = [0 1 0]'. Orient the body so that it is not instantaneously aligned with the nav frame (i.e., nRb != I_3x3). Test that first and second order Coriolis corrections are as expected.
Definition at line 195 of file testNavState.cpp.
| TEST | ( | NavState | , |
| CorrectPIM | |||
| ) |
Definition at line 239 of file testNavState.cpp.
| TEST | ( | NavState | , |
| Stream | |||
| ) |
Definition at line 253 of file testNavState.cpp.
Variable Documentation
| boost::function<Vector9(const NavState&, const bool&)> coriolis |
Definition at line 168 of file testNavState.cpp.
|
static |
Definition at line 167 of file testNavState.cpp.
|
static |
Definition at line 27 of file testNavState.cpp.
|
static |
Definition at line 31 of file testNavState.cpp.
|
static |
Definition at line 35 of file testNavState.cpp.