#include <NoiseModel.h>
Public Types | |
| typedef boost::shared_ptr< Isotropic > | shared_ptr |
 Public Types inherited from gtsam::noiseModel::Diagonal Public Types inherited from gtsam::noiseModel::Diagonal | |
| typedef boost::shared_ptr< Diagonal > | shared_ptr |
| Public Types inherited from gtsam::noiseModel::Gaussian | |
| typedef boost::shared_ptr< Gaussian > | shared_ptr |
| Public Types inherited from gtsam::noiseModel::Base | |
| typedef boost::shared_ptr< Base > | shared_ptr |
Public Member Functions | |
| void | print (const std::string &name) const override |
| double | sigma () const |
| double | squaredMahalanobisDistance (const Vector &v) const override |
| Squared Mahalanobis distance v'*R'*R*v = <R*v,R*v> More... | |
| Vector | unwhiten (const Vector &v) const override |
| Unwhiten an error vector. More... | |
| Vector | whiten (const Vector &v) const override |
| Whiten an error vector. More... | |
| Matrix | Whiten (const Matrix &H) const override |
| void | WhitenInPlace (Matrix &H) const override |
| void | whitenInPlace (Vector &v) const override |
| void | WhitenInPlace (Eigen::Block< Matrix > H) const override |
| ~Isotropic () override | |
| Public Member Functions inherited from gtsam::noiseModel::Diagonal | |
| double | invsigma (size_t i) const |
| const Vector & | invsigmas () const |
| double | precision (size_t i) const |
| const Vector & | precisions () const |
| Matrix | R () const override |
| double | sigma (size_t i) const |
| Vector | sigmas () const override |
| Calculate standard deviations. More... | |
| ~Diagonal () override | |
| Public Member Functions inherited from gtsam::noiseModel::Gaussian | |
| virtual Matrix | covariance () const |
| Compute covariance matrix. More... | |
| bool | equals (const Base &expected, double tol=1e-9) const override |
| virtual Matrix | information () const |
| Compute information matrix. More... | |
| virtual boost::shared_ptr< Diagonal > | QR (Matrix &Ab) const |
| void | WhitenSystem (std::vector< Matrix > &A, Vector &b) const override |
| void | WhitenSystem (Matrix &A, Vector &b) const override |
| void | WhitenSystem (Matrix &A1, Matrix &A2, Vector &b) const override |
| void | WhitenSystem (Matrix &A1, Matrix &A2, Matrix &A3, Vector &b) const override |
| ~Gaussian () override | |
| Public Member Functions inherited from gtsam::noiseModel::Base | |
| Base (size_t dim=1) | |
| primary constructor More... | |
| size_t | dim () const |
| Dimensionality. More... | |
| virtual bool | isConstrained () const |
| true if a constrained noise model, saves slow/clumsy dynamic casting More... | |
| virtual bool | isUnit () const |
| true if a unit noise model, saves slow/clumsy dynamic casting More... | |
| virtual double | loss (const double squared_distance) const |
| loss function, input is Mahalanobis distance More... | |
| virtual double | mahalanobisDistance (const Vector &v) const |
| Mahalanobis distance. More... | |
| virtual Vector | unweightedWhiten (const Vector &v) const |
| virtual void | unwhitenInPlace (Vector &v) const |
| virtual void | unwhitenInPlace (Eigen::Block< Vector > &v) const |
| virtual double | weight (const Vector &v) const |
| virtual void | whitenInPlace (Eigen::Block< Vector > &v) const |
| virtual | ~Base () |
Static Public Member Functions | |
| static shared_ptr | Precision (size_t dim, double precision, bool smart=true) |
| static shared_ptr | Sigma (size_t dim, double sigma, bool smart=true) |
| static shared_ptr | Variance (size_t dim, double variance, bool smart=true) |
| Static Public Member Functions inherited from gtsam::noiseModel::Diagonal | |
| static shared_ptr | Precisions (const Vector &precisions, bool smart=true) |
| static shared_ptr | Sigmas (const Vector &sigmas, bool smart=true) |
| static shared_ptr | Variances (const Vector &variances, bool smart=true) |
| Static Public Member Functions inherited from gtsam::noiseModel::Gaussian | |
| static shared_ptr | Covariance (const Matrix &covariance, bool smart=true) |
| static shared_ptr | Information (const Matrix &M, bool smart=true) |
| static shared_ptr | SqrtInformation (const Matrix &R, bool smart=true) |
Protected Member Functions | |
| Isotropic (size_t dim, double sigma) | |
| Isotropic () | |
| Protected Member Functions inherited from gtsam::noiseModel::Diagonal | |
| Diagonal () | |
| Diagonal (const Vector &sigmas) | |
| Protected Member Functions inherited from gtsam::noiseModel::Gaussian | |
| Gaussian (size_t dim=1, const boost::optional< Matrix > &sqrt_information=boost::none) | |
Protected Attributes | |
| double | invsigma_ |
| double | sigma_ |
| Protected Attributes inherited from gtsam::noiseModel::Diagonal | |
| Vector | invsigmas_ |
| Vector | precisions_ |
| Vector | sigmas_ |
| Protected Attributes inherited from gtsam::noiseModel::Gaussian | |
| boost::optional< Matrix > | sqrt_information_ |
| Protected Attributes inherited from gtsam::noiseModel::Base | |
| size_t | dim_ |
Private Member Functions | |
| template<class ARCHIVE > | |
| void | serialize (ARCHIVE &ar, const unsigned int) |
Friends | |
| class | boost::serialization::access |
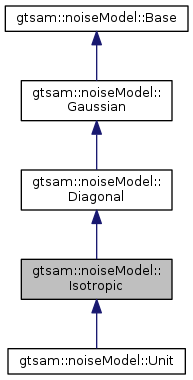
Detailed Description
An isotropic noise model corresponds to a scaled diagonal covariance To construct, use one of the static methods
Definition at line 526 of file NoiseModel.h.
Member Typedef Documentation
| typedef boost::shared_ptr<Isotropic> gtsam::noiseModel::Isotropic::shared_ptr |
Definition at line 541 of file NoiseModel.h.
Constructor & Destructor Documentation
|
inlineprotected |
protected constructor takes sigma
Definition at line 531 of file NoiseModel.h.
|
inlineprotected |
Definition at line 535 of file NoiseModel.h.
|
inlineoverride |
Definition at line 539 of file NoiseModel.h.
Member Function Documentation
|
inlinestatic |
An isotropic noise model created by specifying a precision
Definition at line 559 of file NoiseModel.h.
|
overridevirtual |
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 579 of file NoiseModel.cpp.
|
inlineprivate |
Definition at line 581 of file NoiseModel.h.
|
static |
An isotropic noise model created by specifying a standard devation sigma
Definition at line 567 of file NoiseModel.cpp.
|
inline |
Return standard deviation
Definition at line 575 of file NoiseModel.h.
|
overridevirtual |
Squared Mahalanobis distance v'*R'*R*v = <R*v,R*v>
Reimplemented from gtsam::noiseModel::Base.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 584 of file NoiseModel.cpp.
Unwhiten an error vector.
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 594 of file NoiseModel.cpp.
|
static |
An isotropic noise model created by specifying a variance = sigma^2.
- Parameters
-
dim The dimension of this noise model variance The variance of this noise model smart check if can be simplified to derived class
Definition at line 573 of file NoiseModel.cpp.
Whiten an error vector.
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 589 of file NoiseModel.cpp.
Multiply a derivative with R (derivative of whiten) Equivalent to whitening each column of the input matrix.
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 599 of file NoiseModel.cpp.
|
overridevirtual |
In-place version
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 604 of file NoiseModel.cpp.
|
overridevirtual |
in-place whiten, override if can be done more efficiently
Reimplemented from gtsam::noiseModel::Base.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 609 of file NoiseModel.cpp.
|
overridevirtual |
In-place version
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 614 of file NoiseModel.cpp.
Friends And Related Function Documentation
|
friend |
Serialization function
Definition at line 579 of file NoiseModel.h.
Member Data Documentation
|
protected |
Definition at line 528 of file NoiseModel.h.
|
protected |
Definition at line 528 of file NoiseModel.h.
The documentation for this class was generated from the following files: