#include <NoiseModel.h>
Public Types | |
| typedef boost::shared_ptr< Diagonal > | shared_ptr |
 Public Types inherited from gtsam::noiseModel::Gaussian Public Types inherited from gtsam::noiseModel::Gaussian | |
| typedef boost::shared_ptr< Gaussian > | shared_ptr |
| Public Types inherited from gtsam::noiseModel::Base | |
| typedef boost::shared_ptr< Base > | shared_ptr |
Public Member Functions | |
| double | invsigma (size_t i) const |
| const Vector & | invsigmas () const |
| double | precision (size_t i) const |
| const Vector & | precisions () const |
| void | print (const std::string &name) const override |
| Matrix | R () const override |
| double | sigma (size_t i) const |
| Vector | sigmas () const override |
| Calculate standard deviations. More... | |
| Vector | unwhiten (const Vector &v) const override |
| Unwhiten an error vector. More... | |
| Vector | whiten (const Vector &v) const override |
| Whiten an error vector. More... | |
| Matrix | Whiten (const Matrix &H) const override |
| void | WhitenInPlace (Matrix &H) const override |
| void | WhitenInPlace (Eigen::Block< Matrix > H) const override |
| ~Diagonal () override | |
| Public Member Functions inherited from gtsam::noiseModel::Gaussian | |
| virtual Matrix | covariance () const |
| Compute covariance matrix. More... | |
| bool | equals (const Base &expected, double tol=1e-9) const override |
| virtual Matrix | information () const |
| Compute information matrix. More... | |
| virtual boost::shared_ptr< Diagonal > | QR (Matrix &Ab) const |
| void | WhitenSystem (std::vector< Matrix > &A, Vector &b) const override |
| void | WhitenSystem (Matrix &A, Vector &b) const override |
| void | WhitenSystem (Matrix &A1, Matrix &A2, Vector &b) const override |
| void | WhitenSystem (Matrix &A1, Matrix &A2, Matrix &A3, Vector &b) const override |
| ~Gaussian () override | |
| Public Member Functions inherited from gtsam::noiseModel::Base | |
| Base (size_t dim=1) | |
| primary constructor More... | |
| size_t | dim () const |
| Dimensionality. More... | |
| virtual bool | isConstrained () const |
| true if a constrained noise model, saves slow/clumsy dynamic casting More... | |
| virtual bool | isUnit () const |
| true if a unit noise model, saves slow/clumsy dynamic casting More... | |
| virtual double | loss (const double squared_distance) const |
| loss function, input is Mahalanobis distance More... | |
| virtual double | mahalanobisDistance (const Vector &v) const |
| Mahalanobis distance. More... | |
| virtual double | squaredMahalanobisDistance (const Vector &v) const |
| Squared Mahalanobis distance v'*R'*R*v = <R*v,R*v> More... | |
| virtual Vector | unweightedWhiten (const Vector &v) const |
| virtual void | unwhitenInPlace (Vector &v) const |
| virtual void | unwhitenInPlace (Eigen::Block< Vector > &v) const |
| virtual double | weight (const Vector &v) const |
| virtual void | whitenInPlace (Vector &v) const |
| virtual void | whitenInPlace (Eigen::Block< Vector > &v) const |
| virtual | ~Base () |
Static Public Member Functions | |
| static shared_ptr | Precisions (const Vector &precisions, bool smart=true) |
| static shared_ptr | Sigmas (const Vector &sigmas, bool smart=true) |
| static shared_ptr | Variances (const Vector &variances, bool smart=true) |
| Static Public Member Functions inherited from gtsam::noiseModel::Gaussian | |
| static shared_ptr | Covariance (const Matrix &covariance, bool smart=true) |
| static shared_ptr | Information (const Matrix &M, bool smart=true) |
| static shared_ptr | SqrtInformation (const Matrix &R, bool smart=true) |
Protected Member Functions | |
| Diagonal () | |
| Diagonal (const Vector &sigmas) | |
| Protected Member Functions inherited from gtsam::noiseModel::Gaussian | |
| Gaussian (size_t dim=1, const boost::optional< Matrix > &sqrt_information=boost::none) | |
Protected Attributes | |
| Vector | invsigmas_ |
| Vector | precisions_ |
| Vector | sigmas_ |
| Protected Attributes inherited from gtsam::noiseModel::Gaussian | |
| boost::optional< Matrix > | sqrt_information_ |
| Protected Attributes inherited from gtsam::noiseModel::Base | |
| size_t | dim_ |
Private Member Functions | |
| template<class ARCHIVE > | |
| void | serialize (ARCHIVE &ar, const unsigned int) |
Friends | |
| class | boost::serialization::access |
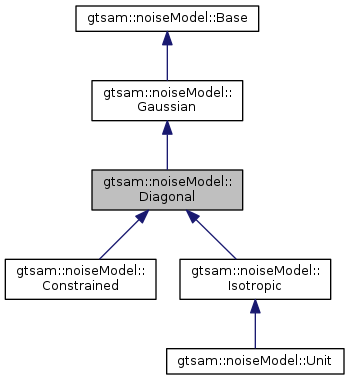
Detailed Description
A diagonal noise model implements a diagonal covariance matrix, with the elements of the diagonal specified in a Vector. This class has no public constructors, instead, use the static constructor functions Sigmas etc...
Definition at line 282 of file NoiseModel.h.
Member Typedef Documentation
| typedef boost::shared_ptr<Diagonal> gtsam::noiseModel::Diagonal::shared_ptr |
Definition at line 301 of file NoiseModel.h.
Constructor & Destructor Documentation
|
protected |
protected constructor - no initializations
Definition at line 244 of file NoiseModel.cpp.
|
protected |
constructor to allow for disabling initialization of invsigmas
Definition at line 250 of file NoiseModel.cpp.
|
inlineoverride |
Definition at line 303 of file NoiseModel.h.
Member Function Documentation
|
inline |
Definition at line 344 of file NoiseModel.h.
|
inline |
Return sqrt precisions
Definition at line 343 of file NoiseModel.h.
|
inline |
Definition at line 350 of file NoiseModel.h.
|
inlinestatic |
A diagonal noise model created by specifying a Vector of precisions, i.e. i.e. the diagonal of the information matrix, i.e., weights
Definition at line 323 of file NoiseModel.h.
|
inline |
Return precisions
Definition at line 349 of file NoiseModel.h.
|
overridevirtual |
Reimplemented from gtsam::noiseModel::Gaussian.
Reimplemented in gtsam::noiseModel::Unit, gtsam::noiseModel::Isotropic, and gtsam::noiseModel::Constrained.
Definition at line 287 of file NoiseModel.cpp.
|
inlineoverridevirtual |
Return R itself, but note that Whiten(H) is cheaper than R*H
Reimplemented from gtsam::noiseModel::Gaussian.
Definition at line 355 of file NoiseModel.h.
|
inlineprivate |
Definition at line 363 of file NoiseModel.h.
|
inline |
Return standard deviations (sqrt of diagonal)
Definition at line 338 of file NoiseModel.h.
|
static |
A diagonal noise model created by specifying a Vector of sigmas, i.e. standard deviations, the diagonal of the square root covariance matrix.
Definition at line 270 of file NoiseModel.cpp.
|
inlineoverridevirtual |
Calculate standard deviations.
Reimplemented from gtsam::noiseModel::Gaussian.
Definition at line 328 of file NoiseModel.h.
Unwhiten an error vector.
Reimplemented from gtsam::noiseModel::Gaussian.
Reimplemented in gtsam::noiseModel::Unit, and gtsam::noiseModel::Isotropic.
Definition at line 297 of file NoiseModel.cpp.
|
static |
A diagonal noise model created by specifying a Vector of variances, i.e. i.e. the diagonal of the covariance matrix.
- Parameters
-
variances A vector containing the variances of this noise model smart check if can be simplified to derived class
Definition at line 258 of file NoiseModel.cpp.
Whiten an error vector.
Reimplemented from gtsam::noiseModel::Gaussian.
Reimplemented in gtsam::noiseModel::Unit, gtsam::noiseModel::Isotropic, and gtsam::noiseModel::Constrained.
Definition at line 292 of file NoiseModel.cpp.
Multiply a derivative with R (derivative of whiten) Equivalent to whitening each column of the input matrix.
Reimplemented from gtsam::noiseModel::Gaussian.
Reimplemented in gtsam::noiseModel::Unit, gtsam::noiseModel::Isotropic, and gtsam::noiseModel::Constrained.
Definition at line 302 of file NoiseModel.cpp.
|
overridevirtual |
In-place version
Reimplemented from gtsam::noiseModel::Gaussian.
Reimplemented in gtsam::noiseModel::Unit, gtsam::noiseModel::Isotropic, and gtsam::noiseModel::Constrained.
Definition at line 307 of file NoiseModel.cpp.
|
overridevirtual |
In-place version
Reimplemented from gtsam::noiseModel::Gaussian.
Reimplemented in gtsam::noiseModel::Unit, gtsam::noiseModel::Isotropic, and gtsam::noiseModel::Constrained.
Definition at line 312 of file NoiseModel.cpp.
Friends And Related Function Documentation
|
friend |
Serialization function
Definition at line 361 of file NoiseModel.h.
Member Data Documentation
|
protected |
Definition at line 290 of file NoiseModel.h.
|
protected |
Definition at line 290 of file NoiseModel.h.
|
protected |
Standard deviations (sigmas), their inverse and inverse square (weights/precisions) These are all computed at construction: the idea is to use one shared model where computation is done only once, the common use case in many problems.
Definition at line 290 of file NoiseModel.h.
The documentation for this class was generated from the following files: