#include <EssentialMatrixFactor.h>
Public Member Functions | |
| gtsam::NonlinearFactor::shared_ptr | clone () const override |
| EssentialMatrixFactor (Key key, const Point2 &pA, const Point2 &pB, const SharedNoiseModel &model) | |
| template<class CALIBRATION > | |
| EssentialMatrixFactor (Key key, const Point2 &pA, const Point2 &pB, const SharedNoiseModel &model, boost::shared_ptr< CALIBRATION > K) | |
| Vector | evaluateError (const EssentialMatrix &E, boost::optional< Matrix & > H=boost::none) const override |
| vector of errors returns 1D vector More... | |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| print More... | |
 Public Member Functions inherited from gtsam::NoiseModelFactor1< EssentialMatrix > Public Member Functions inherited from gtsam::NoiseModelFactor1< EssentialMatrix > | |
| NoiseModelFactor1 () | |
| NoiseModelFactor1 (const SharedNoiseModel &noiseModel, Key key1) | |
| ~NoiseModelFactor1 () override | |
| Key | key () const |
| Vector | unwhitenedError (const Values &x, boost::optional< std::vector< Matrix > & > H=boost::none) const override |
| Public Member Functions inherited from gtsam::NoiseModelFactor | |
| shared_ptr | cloneWithNewNoiseModel (const SharedNoiseModel newNoise) const |
| size_t | dim () const override |
| bool | equals (const NonlinearFactor &f, double tol=1e-9) const override |
| double | error (const Values &c) const override |
| boost::shared_ptr< GaussianFactor > | linearize (const Values &x) const override |
| const SharedNoiseModel & | noiseModel () const |
| access to the noise model More... | |
| NoiseModelFactor () | |
| template<typename CONTAINER > | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) | |
| Vector | unweightedWhitenedError (const Values &c) const |
| double | weight (const Values &c) const |
| Vector | whitenedError (const Values &c) const |
| ~NoiseModelFactor () override | |
| Public Member Functions inherited from gtsam::NonlinearFactor | |
| NonlinearFactor () | |
| template<typename CONTAINER > | |
| NonlinearFactor (const CONTAINER &keys) | |
| virtual | ~NonlinearFactor () |
| virtual bool | active (const Values &) const |
| shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| shared_ptr | rekey (const KeyVector &new_keys) const |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. More... | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys More... | |
| Key | front () const |
| First key. More... | |
| Key | back () const |
| Last key. More... | |
| const_iterator | find (Key key) const |
| find More... | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. More... | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
Private Types | |
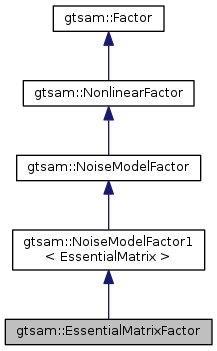
| typedef NoiseModelFactor1< EssentialMatrix > | Base |
| typedef EssentialMatrixFactor | This |
Private Attributes | |
| Vector3 | vA_ |
| Vector3 | vB_ |
| Homogeneous versions, in ideal coordinates. More... | |
Additional Inherited Members | |
| Public Types inherited from gtsam::NoiseModelFactor1< EssentialMatrix > | |
| typedef EssentialMatrix | X |
| Public Types inherited from gtsam::NoiseModelFactor | |
| typedef boost::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::NonlinearFactor | |
| typedef boost::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. More... | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. More... | |
| Protected Types inherited from gtsam::NoiseModelFactor1< EssentialMatrix > | |
| typedef NoiseModelFactor | Base |
| typedef NoiseModelFactor1< EssentialMatrix > | This |
| Protected Types inherited from gtsam::NoiseModelFactor | |
| typedef NonlinearFactor | Base |
| typedef NoiseModelFactor | This |
| Protected Types inherited from gtsam::NonlinearFactor | |
| typedef Factor | Base |
| typedef NonlinearFactor | This |
| Protected Member Functions inherited from gtsam::NoiseModelFactor | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel) | |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality More... | |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
| Protected Attributes inherited from gtsam::NoiseModelFactor | |
| SharedNoiseModel | noiseModel_ |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. More... | |
Detailed Description
Factor that evaluates epipolar error p'Ep for given essential matrix
Definition at line 20 of file EssentialMatrixFactor.h.
Member Typedef Documentation
|
private |
Definition at line 24 of file EssentialMatrixFactor.h.
|
private |
Definition at line 25 of file EssentialMatrixFactor.h.
Constructor & Destructor Documentation
|
inline |
Constructor
- Parameters
-
key Essential Matrix variable key pA point in first camera, in calibrated coordinates pB point in second camera, in calibrated coordinates model noise model is about dot product in ideal, homogeneous coordinates
Definition at line 36 of file EssentialMatrixFactor.h.
|
inline |
Constructor
- Parameters
-
key Essential Matrix variable key pA point in first camera, in pixel coordinates pB point in second camera, in pixel coordinates model noise model is about dot product in ideal, homogeneous coordinates K calibration object, will be used only in constructor
Definition at line 52 of file EssentialMatrixFactor.h.
Member Function Documentation
|
inlineoverridevirtual |
- Returns
- a deep copy of this factor
Reimplemented from gtsam::NonlinearFactor.
Definition at line 61 of file EssentialMatrixFactor.h.
|
inlineoverridevirtual |
vector of errors returns 1D vector
Implements gtsam::NoiseModelFactor1< EssentialMatrix >.
Definition at line 76 of file EssentialMatrixFactor.h.
|
inlineoverridevirtual |
Reimplemented from gtsam::NoiseModelFactor.
Definition at line 67 of file EssentialMatrixFactor.h.
Member Data Documentation
|
private |
Definition at line 22 of file EssentialMatrixFactor.h.
|
private |
Homogeneous versions, in ideal coordinates.
Definition at line 22 of file EssentialMatrixFactor.h.
The documentation for this class was generated from the following file: