Base class for kinematic extensions. More...
#include <kinematic_extension_base.h>
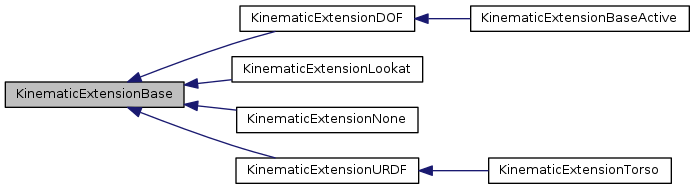
Inheritance diagram for KinematicExtensionBase:
Public Member Functions | |
| virtual KDL::Jacobian | adjustJacobian (const KDL::Jacobian &jac_chain)=0 |
| virtual JointStates | adjustJointStates (const JointStates &joint_states)=0 |
| virtual LimiterParams | adjustLimiterParams (const LimiterParams &limiter_params)=0 |
| virtual bool | initExtension ()=0 |
| KinematicExtensionBase (const TwistControllerParams ¶ms) | |
| virtual void | processResultExtension (const KDL::JntArray &q_dot_ik)=0 |
| virtual | ~KinematicExtensionBase () |
Protected Attributes | |
| ros::NodeHandle | nh_ |
| const TwistControllerParams & | params_ |
| tf::TransformListener | tf_listener_ |
Detailed Description
Base class for kinematic extensions.
Definition at line 28 of file kinematic_extension_base.h.
Constructor & Destructor Documentation
|
inlineexplicit |
give tf_listener_ some time to fill buffer
Definition at line 31 of file kinematic_extension_base.h.
|
inlinevirtual |
Definition at line 38 of file kinematic_extension_base.h.
Member Function Documentation
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
Member Data Documentation
|
protected |
Definition at line 47 of file kinematic_extension_base.h.
|
protected |
Definition at line 49 of file kinematic_extension_base.h.
|
protected |
Definition at line 48 of file kinematic_extension_base.h.
The documentation for this class was generated from the following file: