#include <posvel_gripper_controller.h>
Detailed Description
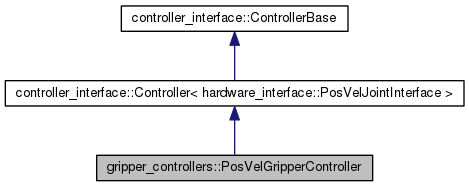
Definition at line 21 of file posvel_gripper_controller.h.
Member Typedef Documentation
typedef actionlib::ActionServer<control_msgs::GripperCommandAction> gripper_controllers::PosVelGripperController::ActionServer [private] |
Definition at line 25 of file posvel_gripper_controller.h.
typedef boost::shared_ptr<ActionServer> gripper_controllers::PosVelGripperController::ActionServerPtr [private] |
Definition at line 26 of file posvel_gripper_controller.h.
Definition at line 27 of file posvel_gripper_controller.h.
typedef realtime_tools::RealtimeServerGoalHandle<control_msgs::GripperCommandAction> gripper_controllers::PosVelGripperController::RealtimeGoalHandle [private] |
Definition at line 28 of file posvel_gripper_controller.h.
typedef boost::shared_ptr<RealtimeGoalHandle> gripper_controllers::PosVelGripperController::RealtimeGoalHandlePtr [private] |
Definition at line 29 of file posvel_gripper_controller.h.
Member Function Documentation
Definition at line 160 of file posvel_gripper_controller.cpp.
| void gripper_controllers::PosVelGripperController::checkForSuccess | ( | const ros::Time & | time, |
| double | error_position, | ||
| double | current_position, | ||
| double | current_velocity, | ||
| double | current_effort, | ||
| double | max_effort | ||
| ) |
Definition at line 212 of file posvel_gripper_controller.cpp.
| double gripper_controllers::PosVelGripperController::gap2Pos | ( | double | gap | ) |
Definition at line 179 of file posvel_gripper_controller.cpp.
Definition at line 121 of file posvel_gripper_controller.cpp.
| bool gripper_controllers::PosVelGripperController::init | ( | hardware_interface::PosVelJointInterface * | hw, |
| ros::NodeHandle & | root_nh, | ||
| ros::NodeHandle & | controller_nh | ||
| ) | [virtual] |
Controller initialization in non-realtime.
Reimplemented from controller_interface::Controller< hardware_interface::PosVelJointInterface >.
Definition at line 7 of file posvel_gripper_controller.cpp.
| double gripper_controllers::PosVelGripperController::pos2Gap | ( | double | pos | ) |
Definition at line 195 of file posvel_gripper_controller.cpp.
Definition at line 106 of file posvel_gripper_controller.cpp.
Definition at line 202 of file posvel_gripper_controller.cpp.
| void gripper_controllers::PosVelGripperController::starting | ( | const ros::Time & | time | ) | [virtual] |
Controller startup in realtime.
Reimplemented from controller_interface::ControllerBase.
Definition at line 57 of file posvel_gripper_controller.cpp.
Controller stopping in realtime.
Definition at line 101 of file posvel_gripper_controller.cpp.
| void gripper_controllers::PosVelGripperController::update | ( | const ros::Time & | time, |
| const ros::Duration & | period | ||
| ) | [virtual] |
Controller update loop in realtime.
Implements controller_interface::ControllerBase.
Definition at line 75 of file posvel_gripper_controller.cpp.
Member Data Documentation
double gripper_controllers::PosVelGripperController::_lastGap [private] |
Definition at line 46 of file posvel_gripper_controller.h.
Definition at line 41 of file posvel_gripper_controller.h.
Definition at line 34 of file posvel_gripper_controller.h.
realtime_tools::RealtimeBuffer<Commands> gripper_controllers::PosVelGripperController::command_ [private] |
Definition at line 37 of file posvel_gripper_controller.h.
Definition at line 36 of file posvel_gripper_controller.h.
Definition at line 36 of file posvel_gripper_controller.h.
Definition at line 42 of file posvel_gripper_controller.h.
double gripper_controllers::PosVelGripperController::default_max_effort_ [private] |
Max allowed effort.
Definition at line 44 of file posvel_gripper_controller.h.
Definition at line 40 of file posvel_gripper_controller.h.
double gripper_controllers::PosVelGripperController::goal_tolerance_ [private] |
Definition at line 45 of file posvel_gripper_controller.h.
double gripper_controllers::PosVelGripperController::joints_vel_ [private] |
Definition at line 48 of file posvel_gripper_controller.h.
Definition at line 39 of file posvel_gripper_controller.h.
hardware_interface::PosVelJointHandle gripper_controllers::PosVelGripperController::leftjoint [private] |
Definition at line 31 of file posvel_gripper_controller.h.
control_msgs::GripperCommandResultPtr gripper_controllers::PosVelGripperController::pre_alloc_result_ [private] |
Definition at line 38 of file posvel_gripper_controller.h.
hardware_interface::PosVelJointHandle gripper_controllers::PosVelGripperController::rightjoint [private] |
Definition at line 32 of file posvel_gripper_controller.h.
Currently active action goal, if any.
Definition at line 35 of file posvel_gripper_controller.h.
double gripper_controllers::PosVelGripperController::stall_timeout_ [private] |
Definition at line 43 of file posvel_gripper_controller.h.
Stall related parameters.
Definition at line 43 of file posvel_gripper_controller.h.
The documentation for this class was generated from the following files: