The ActionNodeBase is the base class to use to create any kind of action. A particular derived class is free to override executeTick() as needed. More...
#include <action_node.h>
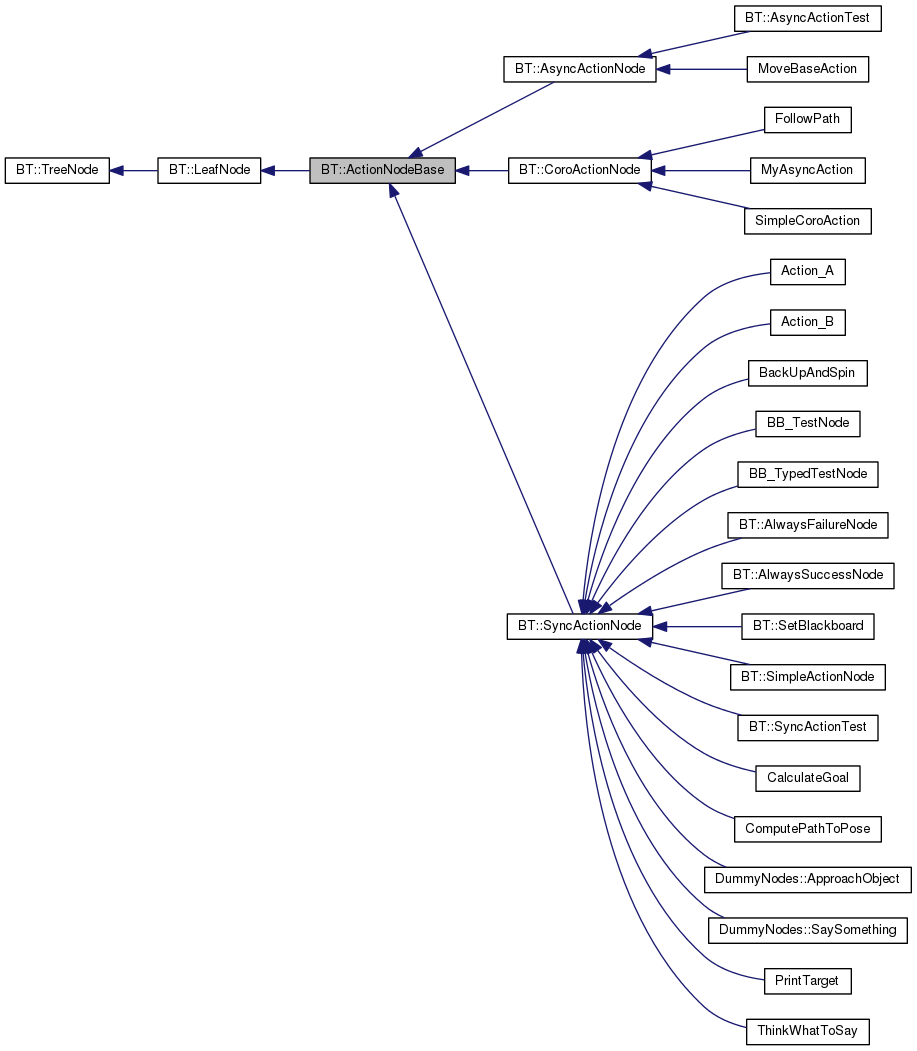
Inheritance diagram for BT::ActionNodeBase:
Public Member Functions | |
| ActionNodeBase (const std::string &name, const NodeConfiguration &config) | |
| virtual NodeType | type () const override final |
| ~ActionNodeBase () override | |
Detailed Description
The ActionNodeBase is the base class to use to create any kind of action. A particular derived class is free to override executeTick() as needed.
Definition at line 34 of file action_node.h.
Constructor & Destructor Documentation
| BT::ActionNodeBase::ActionNodeBase | ( | const std::string & | name, |
| const NodeConfiguration & | config | ||
| ) |
Definition at line 19 of file action_node.cpp.
| BT::ActionNodeBase::~ActionNodeBase | ( | ) | [override] |
Member Function Documentation
| virtual NodeType BT::ActionNodeBase::type | ( | ) | const [inline, override, virtual] |
Implements BT::TreeNode.
Definition at line 41 of file action_node.h.
The documentation for this class was generated from the following files: