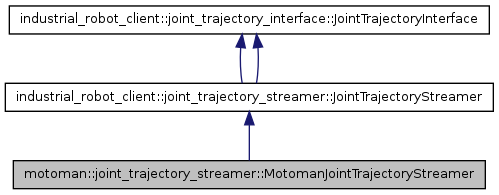
Message handler that streams joint trajectories to the robot controller. Contains FS100-specific motion control commands. More...
#include <joint_trajectory_streamer.h>
Public Member Functions | |
| virtual bool | create_message (int seq, const trajectory_msgs::JointTrajectoryPoint &pt, SimpleMessage *msg) |
| Create SimpleMessage for sending to the robot. | |
| virtual bool | init (SmplMsgConnection *connection, const std::vector< std::string > &joint_names, const std::map< std::string, double > &velocity_limits=std::map< std::string, double >()) |
| Class initializer. | |
| MotomanJointTrajectoryStreamer (int robot_id=-1) | |
| Default constructor. | |
| virtual bool | send_to_robot (const std::vector< SimpleMessage > &messages) |
| Send trajectory to robot, using this node's robot-connection. Specific method must be implemented in a derived class (e.g. streaming, download, etc.) | |
| virtual void | streamingThread () |
| ~MotomanJointTrajectoryStreamer () | |
Protected Member Functions | |
| bool | is_valid (const trajectory_msgs::JointTrajectory &traj) |
| void | trajectoryStop () |
Static Protected Member Functions | |
| static bool | VectorToJointData (const std::vector< double > &vec, industrial::joint_data::JointData &joints) |
Protected Attributes | |
| MotomanMotionCtrl | motion_ctrl_ |
| int | robot_id_ |
Static Protected Attributes | |
| static const double | pos_stale_time_ = 1.0 |
| static const double | start_pos_tol_ = 1e-4 |
Detailed Description
Message handler that streams joint trajectories to the robot controller. Contains FS100-specific motion control commands.
THIS CLASS IS NOT THREAD-SAFE
Definition at line 61 of file joint_trajectory_streamer.h.
Constructor & Destructor Documentation
| motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::MotomanJointTrajectoryStreamer | ( | int | robot_id = -1 | ) | [inline] |
Default constructor.
- Parameters:
-
robot_id robot group # on this controller (for multi-group systems)
Definition at line 76 of file joint_trajectory_streamer.h.
| motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::~MotomanJointTrajectoryStreamer | ( | ) |
Definition at line 72 of file joint_trajectory_streamer.cpp.
Member Function Documentation
| bool motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::create_message | ( | int | seq, |
| const trajectory_msgs::JointTrajectoryPoint & | pt, | ||
| SimpleMessage * | msg | ||
| ) | [virtual] |
Create SimpleMessage for sending to the robot.
- Parameters:
-
[in] seq sequence # of this point in the overall trajectory [in] pt trajectory point data [out] msg message for sending to robot
- Returns:
- true on success, false otherwise
Reimplemented from industrial_robot_client::joint_trajectory_interface::JointTrajectoryInterface.
Definition at line 79 of file joint_trajectory_streamer.cpp.
| bool motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::init | ( | SmplMsgConnection * | connection, |
| const std::vector< std::string > & | joint_names, | ||
| const std::map< std::string, double > & | velocity_limits = std::map<std::string, double>() |
||
| ) | [virtual] |
Class initializer.
- Parameters:
-
connection simple message connection that will be used to send commands to robot (ALREADY INITIALIZED) joint_names list of expected joint-names. - Count and order should match data sent to robot connection.
- Use blank-name to insert a placeholder joint position (typ. 0.0).
- Joints in the incoming JointTrajectory stream that are NOT listed here will be ignored.
velocity_limits map of maximum velocities for each joint - leave empty to lookup from URDF
- Returns:
- true on success, false otherwise (an invalid message type)
Reimplemented from industrial_robot_client::joint_trajectory_streamer::JointTrajectoryStreamer.
Definition at line 54 of file joint_trajectory_streamer.cpp.
| bool motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::is_valid | ( | const trajectory_msgs::JointTrajectory & | traj | ) | [protected, virtual] |
Reimplemented from industrial_robot_client::joint_trajectory_interface::JointTrajectoryInterface.
Definition at line 260 of file joint_trajectory_streamer.cpp.
| bool motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::send_to_robot | ( | const std::vector< SimpleMessage > & | messages | ) | [virtual] |
Send trajectory to robot, using this node's robot-connection. Specific method must be implemented in a derived class (e.g. streaming, download, etc.)
- Parameters:
-
messages List of SimpleMessages to send to robot.
- Returns:
- true on success, false otherwise
Reimplemented from industrial_robot_client::joint_trajectory_streamer::JointTrajectoryStreamer.
Definition at line 144 of file joint_trajectory_streamer.cpp.
| void motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::streamingThread | ( | ) | [virtual] |
Reimplemented from industrial_robot_client::joint_trajectory_streamer::JointTrajectoryStreamer.
Definition at line 153 of file joint_trajectory_streamer.cpp.
| void motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::trajectoryStop | ( | ) | [protected, virtual] |
Reimplemented from industrial_robot_client::joint_trajectory_streamer::JointTrajectoryStreamer.
Definition at line 253 of file joint_trajectory_streamer.cpp.
| bool motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::VectorToJointData | ( | const std::vector< double > & | vec, |
| industrial::joint_data::JointData & | joints | ||
| ) | [static, protected] |
Definition at line 129 of file joint_trajectory_streamer.cpp.
Member Data Documentation
MotomanMotionCtrl motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::motion_ctrl_ [protected] |
Definition at line 116 of file joint_trajectory_streamer.h.
const double motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::pos_stale_time_ = 1.0 [static, protected] |
Definition at line 112 of file joint_trajectory_streamer.h.
Definition at line 115 of file joint_trajectory_streamer.h.
const double motoman::joint_trajectory_streamer::MotomanJointTrajectoryStreamer::start_pos_tol_ = 1e-4 [static, protected] |
Definition at line 113 of file joint_trajectory_streamer.h.
The documentation for this class was generated from the following files: