#include <ROSInterface.h>
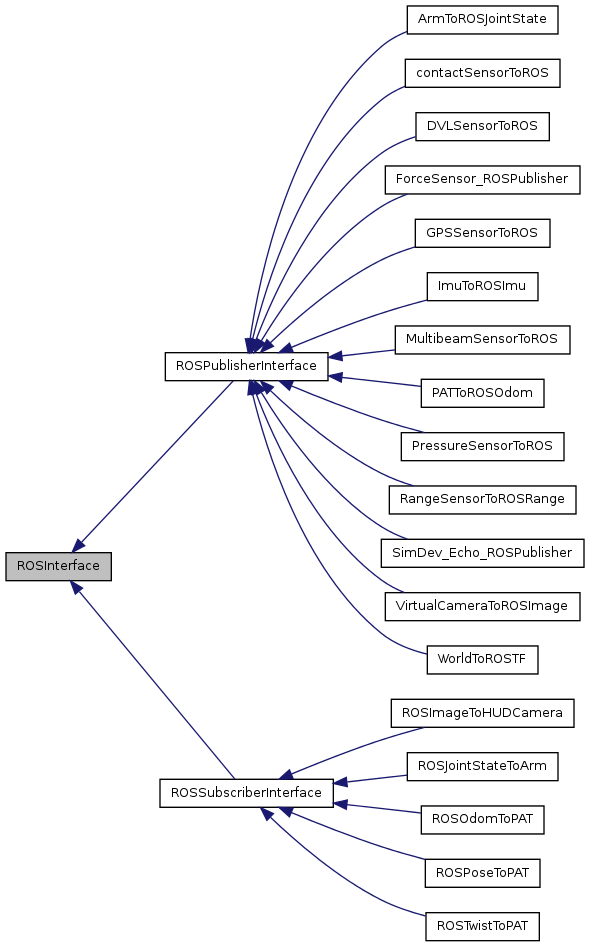
Inheritance diagram for ROSInterface:
Public Member Functions | |
| ROSInterface (std::string topic) | |
| virtual | ~ROSInterface () |
Static Public Member Functions | |
| static ros::Time | getROSTime () |
| static void | setROSTime (const ros::Time &time) |
Protected Attributes | |
| ros::NodeHandle | nh_ |
| std::string | topic |
Static Protected Attributes | |
| static ros::Time | current_time_ |
Detailed Description
Definition at line 64 of file ROSInterface.h.
Constructor & Destructor Documentation
| ROSInterface::ROSInterface | ( | std::string | topic | ) | [inline] |
Definition at line 72 of file ROSInterface.h.
| virtual ROSInterface::~ROSInterface | ( | ) | [inline, virtual] |
Definition at line 77 of file ROSInterface.h.
Member Function Documentation
| static ros::Time ROSInterface::getROSTime | ( | ) | [inline, static] |
Retrieve the current ROS time. Use this instead of calling ros::Time::now() when setting the timestamp of your messages.
Definition at line 95 of file ROSInterface.h.
| static void ROSInterface::setROSTime | ( | const ros::Time & | time | ) | [inline, static] |
Sets the static ros time in the ROSInterface, to be called once per simulation step
Definition at line 85 of file ROSInterface.h.
Member Data Documentation
ros::Time ROSInterface::current_time_ [static, protected] |
Definition at line 69 of file ROSInterface.h.
ros::NodeHandle ROSInterface::nh_ [protected] |
Definition at line 68 of file ROSInterface.h.
std::string ROSInterface::topic [protected] |
Definition at line 67 of file ROSInterface.h.
The documentation for this class was generated from the following files: