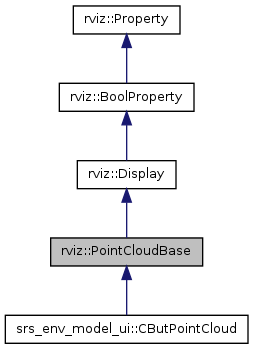
Displays a point cloud of type sensor_msgs::PointCloud. More...
#include <point_cloud_base.h>
Classes | |
| struct | CloudInfo |
| struct | PluginConns |
| struct | TransformerInfo |
Public Types | |
| enum | ChannelRender { Intensity, Curvature, ColorRGBSpace, NormalSphere, ChannelRenderCount } |
| The different channels that we support rendering. More... | |
| enum | Style { Points, Billboards, BillboardSpheres, Boxes, StyleCount } |
| The different styles of pointcloud drawing. More... | |
Public Member Functions | |
| void | causeRetransform () |
| virtual void | createProperties () |
| virtual void | fixedFrameChanged () |
| float | getAlpha () |
| float | getBillboardSize () |
| float | getDecayTime () |
| bool | getSelectable () |
| int | getStyle () |
| PointCloudBase (const std::string &name, VisualizationManager *manager) | |
| virtual void | reset () |
| void | setAlpha (float alpha) |
| void | setBillboardSize (float size) |
| Sets the size each point will be when drawn in 3D as a billboard. | |
| void | setDecayTime (float time) |
| Set the amount of time each cloud should stick around for. | |
| void | setSelectable (bool selectable) |
| void | setStyle (int style) |
| Set the rendering style. | |
| virtual void | update (float wall_dt, float ros_dt) |
| ~PointCloudBase () | |
Protected Types | |
| typedef std::map< Plugin *, PluginConns > | M_PluginConns |
| typedef std::map< std::string, TransformerInfo > | M_TransformerInfo |
| typedef std::vector < ogre_tools::PointCloud::Point > | V_Point |
| typedef std::vector< V_Point > | VV_Point |
Protected Member Functions | |
| void | addMessage (const sensor_msgs::PointCloudConstPtr &cloud) |
| void | addMessage (const sensor_msgs::PointCloud2ConstPtr &cloud) |
| const std::string & | getColorTransformer () |
| PointCloudTransformerPtr | getColorTransformer (const sensor_msgs::PointCloud2ConstPtr &cloud) |
| const std::string & | getXYZTransformer () |
| PointCloudTransformerPtr | getXYZTransformer (const sensor_msgs::PointCloud2ConstPtr &cloud) |
| void | loadTransformers (Plugin *plugin) |
| virtual void | onDisable () |
| virtual void | onEnable () |
| void | onPluginLoaded (const PluginStatus &status) |
| void | onPluginUnloading (const PluginStatus &status) |
| void | onTransformerOptions (V_string &ops, uint32_t mask) |
| void | processMessage (const sensor_msgs::PointCloud2ConstPtr &cloud) |
| void | retransform () |
| void | setColorTransformer (const std::string &name) |
| void | setXYZTransformer (const std::string &name) |
| bool | transformCloud (const CloudInfoPtr &cloud, V_Point &points, bool fully_update_transformers) |
| Transforms the cloud into the correct frame, and sets up our renderable cloud. | |
| void | updateStatus () |
| void | updateTransformers (const sensor_msgs::PointCloud2ConstPtr &cloud, bool fully_update) |
Protected Attributes | |
| float | alpha_ |
| FloatPropertyWPtr | alpha_property_ |
| float | billboard_size_ |
| Size to draw our billboards. | |
| FloatPropertyWPtr | billboard_size_property_ |
| ros::CallbackQueue | cbqueue_ |
| ogre_tools::PointCloud * | cloud_ |
| D_CloudInfo | clouds_ |
| boost::mutex | clouds_mutex_ |
| CollObjectHandle | coll_handle_ |
| PointCloudSelectionHandlerPtr | coll_handler_ |
| std::string | color_transformer_ |
| EditEnumPropertyWPtr | color_transformer_property_ |
| FloatPropertyWPtr | decay_time_property_ |
| uint32_t | messages_received_ |
| bool | needs_retransform_ |
| bool | new_cloud_ |
| V_CloudInfo | new_clouds_ |
| boost::mutex | new_clouds_mutex_ |
| bool | new_color_transformer_ |
| VV_Point | new_points_ |
| bool | new_xyz_transformer_ |
| M_PluginConns | plugin_conns_ |
| float | point_decay_time_ |
| How long clouds should stick around for before they are culled. | |
| Ogre::SceneNode * | scene_node_ |
| bool | selectable_ |
| BoolPropertyWPtr | selectable_property_ |
| ros::AsyncSpinner | spinner_ |
| int | style_ |
| Our rendering style. | |
| EnumPropertyWPtr | style_property_ |
| uint32_t | total_point_count_ |
| M_TransformerInfo | transformers_ |
| boost::recursive_mutex | transformers_mutex_ |
| std::string | xyz_transformer_ |
| EditEnumPropertyWPtr | xyz_transformer_property_ |
Private Types | |
| typedef boost::shared_ptr < CloudInfo > | CloudInfoPtr |
| typedef std::deque< CloudInfoPtr > | D_CloudInfo |
| typedef std::queue< CloudInfoPtr > | Q_CloudInfo |
| typedef std::vector< CloudInfoPtr > | V_CloudInfo |
Friends | |
| class | PointCloudSelectionHandler |
Detailed Description
Displays a point cloud of type sensor_msgs::PointCloud.
By default it will assume channel 0 of the cloud is an intensity value, and will color them by intensity. If you set the channel's name to "rgb", it will interpret the channel as an integer rgb value, with r, g and b all being 8 bits.
Definition at line 97 of file point_cloud_base.h.
Member Typedef Documentation
typedef boost::shared_ptr<CloudInfo> rviz::PointCloudBase::CloudInfoPtr [private] |
Definition at line 117 of file point_cloud_base.h.
typedef std::deque<CloudInfoPtr> rviz::PointCloudBase::D_CloudInfo [private] |
Definition at line 118 of file point_cloud_base.h.
typedef std::map<Plugin*, PluginConns> rviz::PointCloudBase::M_PluginConns [protected] |
Definition at line 278 of file point_cloud_base.h.
typedef std::map<std::string, TransformerInfo> rviz::PointCloudBase::M_TransformerInfo [protected] |
Definition at line 244 of file point_cloud_base.h.
typedef std::queue<CloudInfoPtr> rviz::PointCloudBase::Q_CloudInfo [private] |
Definition at line 120 of file point_cloud_base.h.
typedef std::vector<CloudInfoPtr> rviz::PointCloudBase::V_CloudInfo [private] |
Definition at line 119 of file point_cloud_base.h.
typedef std::vector<ogre_tools::PointCloud::Point> rviz::PointCloudBase::V_Point [protected] |
Definition at line 192 of file point_cloud_base.h.
typedef std::vector<V_Point> rviz::PointCloudBase::VV_Point [protected] |
Definition at line 193 of file point_cloud_base.h.
Member Enumeration Documentation
The different channels that we support rendering.
- Enumerator:
Intensity Intensity data.
Curvature Surface curvature estimates.
ColorRGBSpace RGB Color.
NormalSphere Use the nx-ny-nz (normal coordinates) instead of x-y-z.
ChannelRenderCount
Definition at line 141 of file point_cloud_base.h.
The different styles of pointcloud drawing.
- Enumerator:
Definition at line 127 of file point_cloud_base.h.
Constructor & Destructor Documentation
| rviz::PointCloudBase::PointCloudBase | ( | const std::string & | name, |
| VisualizationManager * | manager | ||
| ) |
Definition at line 365 of file point_cloud_base.cpp.
Definition at line 421 of file point_cloud_base.cpp.
Member Function Documentation
| void rviz::PointCloudBase::addMessage | ( | const sensor_msgs::PointCloudConstPtr & | cloud | ) | [protected] |
Definition at line 1157 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::addMessage | ( | const sensor_msgs::PointCloud2ConstPtr & | cloud | ) | [protected] |
Definition at line 1164 of file point_cloud_base.cpp.
Definition at line 665 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::createProperties | ( | ) | [virtual] |
Reimplemented in srs_env_model_ui::CButPointCloud.
Definition at line 1206 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::fixedFrameChanged | ( | ) | [virtual] |
Reimplemented from rviz::Display.
Reimplemented in srs_env_model_ui::CButPointCloud.
Definition at line 1176 of file point_cloud_base.cpp.
| float rviz::PointCloudBase::getAlpha | ( | ) | [inline] |
Definition at line 174 of file point_cloud_base.h.
| float rviz::PointCloudBase::getBillboardSize | ( | ) | [inline] |
Definition at line 170 of file point_cloud_base.h.
| const std::string& rviz::PointCloudBase::getColorTransformer | ( | ) | [inline, protected] |
Definition at line 208 of file point_cloud_base.h.
| PointCloudTransformerPtr rviz::PointCloudBase::getColorTransformer | ( | const sensor_msgs::PointCloud2ConstPtr & | cloud | ) | [protected] |
Definition at line 993 of file point_cloud_base.cpp.
| float rviz::PointCloudBase::getDecayTime | ( | ) | [inline] |
Definition at line 172 of file point_cloud_base.h.
| bool rviz::PointCloudBase::getSelectable | ( | ) | [inline] |
Definition at line 177 of file point_cloud_base.h.
| int rviz::PointCloudBase::getStyle | ( | ) | [inline] |
Definition at line 171 of file point_cloud_base.h.
| const std::string& rviz::PointCloudBase::getXYZTransformer | ( | ) | [inline, protected] |
Definition at line 207 of file point_cloud_base.h.
| PointCloudTransformerPtr rviz::PointCloudBase::getXYZTransformer | ( | const sensor_msgs::PointCloud2ConstPtr & | cloud | ) | [protected] |
Definition at line 977 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::loadTransformers | ( | Plugin * | plugin | ) | [protected] |
Definition at line 521 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::onDisable | ( | ) | [protected, virtual] |
Reimplemented from rviz::Display.
Reimplemented in srs_env_model_ui::CButPointCloud.
Definition at line 657 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::onEnable | ( | ) | [protected, virtual] |
Reimplemented from rviz::Display.
Reimplemented in srs_env_model_ui::CButPointCloud.
Definition at line 653 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::onPluginLoaded | ( | const PluginStatus & | status | ) | [protected] |
Definition at line 455 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::onPluginUnloading | ( | const PluginStatus & | status | ) | [protected] |
Definition at line 460 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::onTransformerOptions | ( | V_string & | ops, |
| uint32_t | mask | ||
| ) | [protected] |
Definition at line 1181 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::processMessage | ( | const sensor_msgs::PointCloud2ConstPtr & | cloud | ) | [protected] |
Definition at line 918 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::reset | ( | void | ) | [virtual] |
Reimplemented from rviz::Display.
Definition at line 1271 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::retransform | ( | ) | [protected] |
Definition at line 1009 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::setAlpha | ( | float | alpha | ) |
Definition at line 556 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::setBillboardSize | ( | float | size | ) |
Sets the size each point will be when drawn in 3D as a billboard.
- Note:
- Only applicable if the style is set to Billboards (default)
- Parameters:
-
size The size
Definition at line 642 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::setColorTransformer | ( | const std::string & | name | ) | [protected] |
Definition at line 957 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::setDecayTime | ( | float | time | ) |
Set the amount of time each cloud should stick around for.
- Parameters:
-
time Decay time, in seconds
Definition at line 597 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::setSelectable | ( | bool | selectable | ) |
Definition at line 565 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::setStyle | ( | int | style | ) |
Set the rendering style.
- Parameters:
-
style The rendering style
Definition at line 606 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::setXYZTransformer | ( | const std::string & | name | ) | [protected] |
Definition at line 937 of file point_cloud_base.cpp.
| bool rviz::PointCloudBase::transformCloud | ( | const CloudInfoPtr & | cloud, |
| V_Point & | points, | ||
| bool | fully_update_transformers | ||
| ) | [protected] |
Transforms the cloud into the correct frame, and sets up our renderable cloud.
Definition at line 1036 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::update | ( | float | wall_dt, |
| float | ros_dt | ||
| ) | [virtual] |
Reimplemented from rviz::Display.
Reimplemented in srs_env_model_ui::CButPointCloud.
Definition at line 671 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::updateStatus | ( | ) | [protected] |
Definition at line 898 of file point_cloud_base.cpp.
| void rviz::PointCloudBase::updateTransformers | ( | const sensor_msgs::PointCloud2ConstPtr & | cloud, |
| bool | fully_update | ||
| ) | [protected] |
Definition at line 798 of file point_cloud_base.cpp.
Friends And Related Function Documentation
friend class PointCloudSelectionHandler [friend] |
Definition at line 281 of file point_cloud_base.h.
Member Data Documentation
float rviz::PointCloudBase::alpha_ [protected] |
Definition at line 233 of file point_cloud_base.h.
FloatPropertyWPtr rviz::PointCloudBase::alpha_property_ [protected] |
Definition at line 267 of file point_cloud_base.h.
float rviz::PointCloudBase::billboard_size_ [protected] |
Size to draw our billboards.
Definition at line 255 of file point_cloud_base.h.
FloatPropertyWPtr rviz::PointCloudBase::billboard_size_property_ [protected] |
Definition at line 266 of file point_cloud_base.h.
ros::CallbackQueue rviz::PointCloudBase::cbqueue_ [protected] |
Definition at line 220 of file point_cloud_base.h.
ogre_tools::PointCloud* rviz::PointCloudBase::cloud_ [protected] |
Definition at line 226 of file point_cloud_base.h.
D_CloudInfo rviz::PointCloudBase::clouds_ [protected] |
Definition at line 222 of file point_cloud_base.h.
boost::mutex rviz::PointCloudBase::clouds_mutex_ [protected] |
Definition at line 223 of file point_cloud_base.h.
CollObjectHandle rviz::PointCloudBase::coll_handle_ [protected] |
Definition at line 259 of file point_cloud_base.h.
Definition at line 260 of file point_cloud_base.h.
std::string rviz::PointCloudBase::color_transformer_ [protected] |
Definition at line 249 of file point_cloud_base.h.
EditEnumPropertyWPtr rviz::PointCloudBase::color_transformer_property_ [protected] |
Definition at line 269 of file point_cloud_base.h.
FloatPropertyWPtr rviz::PointCloudBase::decay_time_property_ [protected] |
Definition at line 271 of file point_cloud_base.h.
uint32_t rviz::PointCloudBase::messages_received_ [protected] |
Definition at line 262 of file point_cloud_base.h.
bool rviz::PointCloudBase::needs_retransform_ [protected] |
Definition at line 252 of file point_cloud_base.h.
bool rviz::PointCloudBase::new_cloud_ [protected] |
Definition at line 224 of file point_cloud_base.h.
V_CloudInfo rviz::PointCloudBase::new_clouds_ [protected] |
Definition at line 230 of file point_cloud_base.h.
boost::mutex rviz::PointCloudBase::new_clouds_mutex_ [protected] |
Definition at line 231 of file point_cloud_base.h.
bool rviz::PointCloudBase::new_color_transformer_ [protected] |
Definition at line 251 of file point_cloud_base.h.
VV_Point rviz::PointCloudBase::new_points_ [protected] |
Definition at line 229 of file point_cloud_base.h.
bool rviz::PointCloudBase::new_xyz_transformer_ [protected] |
Definition at line 250 of file point_cloud_base.h.
M_PluginConns rviz::PointCloudBase::plugin_conns_ [protected] |
Definition at line 279 of file point_cloud_base.h.
float rviz::PointCloudBase::point_decay_time_ [protected] |
How long clouds should stick around for before they are culled.
Definition at line 256 of file point_cloud_base.h.
Ogre::SceneNode* rviz::PointCloudBase::scene_node_ [protected] |
Reimplemented from rviz::Display.
Definition at line 227 of file point_cloud_base.h.
bool rviz::PointCloudBase::selectable_ [protected] |
Definition at line 258 of file point_cloud_base.h.
BoolPropertyWPtr rviz::PointCloudBase::selectable_property_ [protected] |
Definition at line 265 of file point_cloud_base.h.
ros::AsyncSpinner rviz::PointCloudBase::spinner_ [protected] |
Definition at line 219 of file point_cloud_base.h.
int rviz::PointCloudBase::style_ [protected] |
Our rendering style.
Definition at line 254 of file point_cloud_base.h.
EnumPropertyWPtr rviz::PointCloudBase::style_property_ [protected] |
Definition at line 270 of file point_cloud_base.h.
uint32_t rviz::PointCloudBase::total_point_count_ [protected] |
Definition at line 263 of file point_cloud_base.h.
M_TransformerInfo rviz::PointCloudBase::transformers_ [protected] |
Definition at line 247 of file point_cloud_base.h.
boost::recursive_mutex rviz::PointCloudBase::transformers_mutex_ [protected] |
Definition at line 246 of file point_cloud_base.h.
std::string rviz::PointCloudBase::xyz_transformer_ [protected] |
Definition at line 248 of file point_cloud_base.h.
EditEnumPropertyWPtr rviz::PointCloudBase::xyz_transformer_property_ [protected] |
Definition at line 268 of file point_cloud_base.h.
The documentation for this class was generated from the following files: