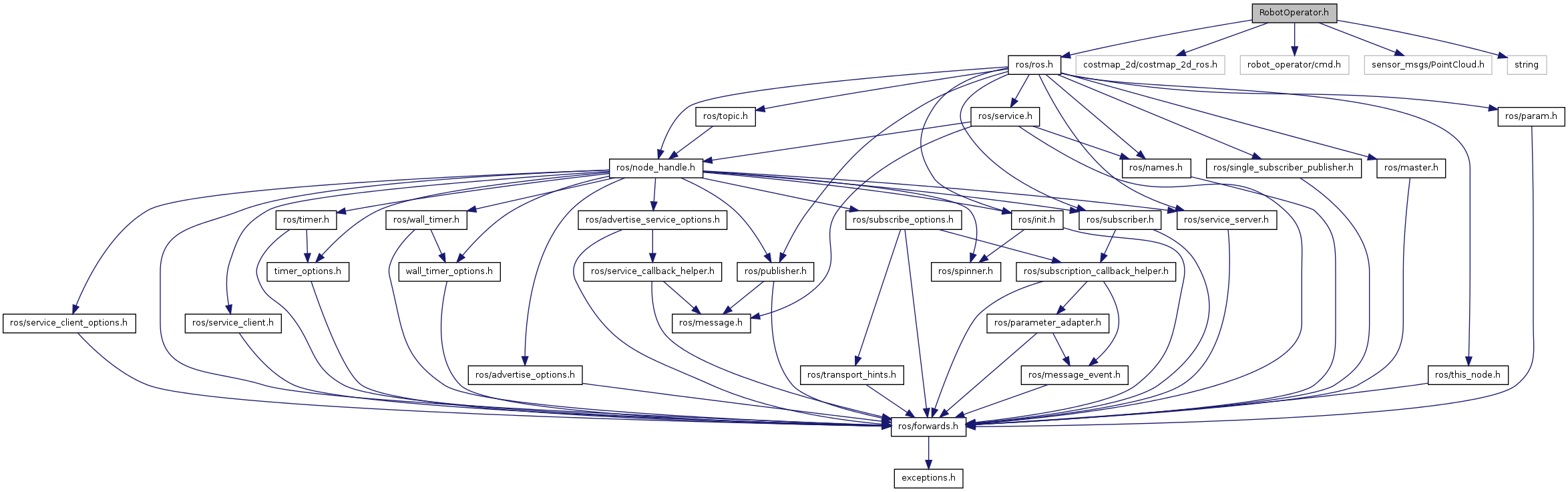
#include <ros/ros.h>#include <costmap_2d/costmap_2d_ros.h>#include <robot_operator/cmd.h>#include <sensor_msgs/PointCloud.h>#include "string"
Include dependency graph for RobotOperator.h:
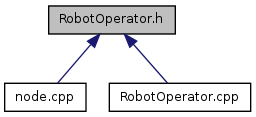
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | RobotOperator |
Defines | |
| #define | COMMAND_TOPIC "cmd" |
| #define | CONTROL_TOPIC "cmd_vel" |
| #define | LUT_RESOLUTION 100 |
| #define | NODE_NAME "operator" |
| #define | PLAN_TOPIC "desired" |
| #define | ROUTE_TOPIC "route" |
Define Documentation
| #define COMMAND_TOPIC "cmd" |
Definition at line 5 of file RobotOperator.h.
| #define CONTROL_TOPIC "cmd_vel" |
Definition at line 6 of file RobotOperator.h.
| #define LUT_RESOLUTION 100 |
Definition at line 9 of file RobotOperator.h.
| #define NODE_NAME "operator" |
Definition at line 4 of file RobotOperator.h.
| #define PLAN_TOPIC "desired" |
Definition at line 8 of file RobotOperator.h.
| #define ROUTE_TOPIC "route" |
Definition at line 7 of file RobotOperator.h.