Include dependency graph for correspondence.h:
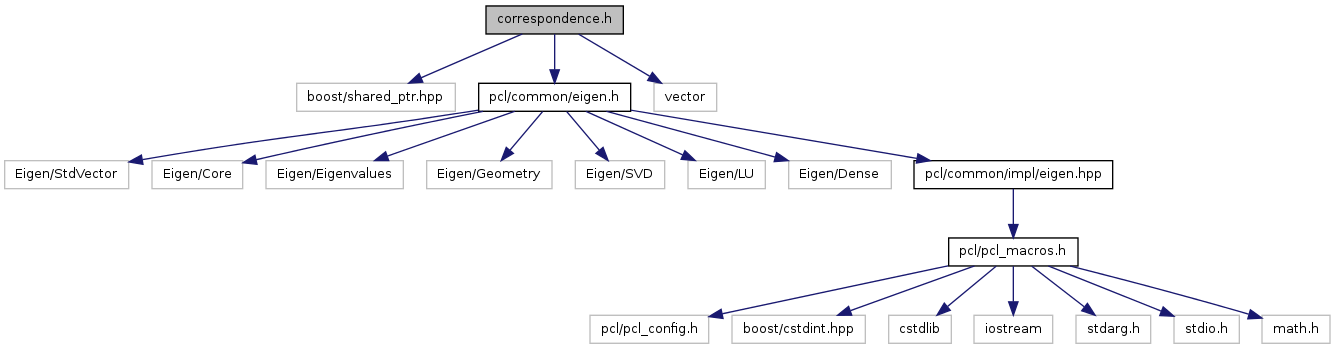
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | pcl::Correspondence |
| Correspondence represents a match between two entities (e.g., points, descriptors, etc). This is represesented via the indices of a source point and a target point, and the distance between them. More... | |
| struct | pcl::PointCorrespondence3D |
| Representation of a (possible) correspondence between two 3D points in two different coordinate frames (e.g. from feature matching) More... | |
| struct | pcl::PointCorrespondence6D |
| Representation of a (possible) correspondence between two points (e.g. from feature matching), that encode complete 6DOF transoformations. More... | |
Namespaces | |
| namespace | pcl |
Typedefs | |
| typedef std::vector < pcl::Correspondence, Eigen::aligned_allocator < pcl::Correspondence > > | pcl::Correspondences |
| typedef boost::shared_ptr < const Correspondences > | pcl::CorrespondencesConstPtr |
| typedef boost::shared_ptr < Correspondences > | pcl::CorrespondencesPtr |
| typedef std::vector < PointCorrespondence3D, Eigen::aligned_allocator < PointCorrespondence3D > > | pcl::PointCorrespondences3DVector |
| typedef std::vector < PointCorrespondence6D, Eigen::aligned_allocator < PointCorrespondence6D > > | pcl::PointCorrespondences6DVector |
Functions | |
| void | pcl::getRejectedQueryIndices (const pcl::Correspondences &correspondences_before, const pcl::Correspondences &correspondences_after, std::vector< int > &indices, bool presorting_required=true) |
| Get the query points of correspondences that are present in one correspondence vector but not in the other, e.g., to compare correspondences before and after rejection. | |
| bool | pcl::isBetterCorrespondence (const Correspondence &pc1, const Correspondence &pc2) |
| Comparator to enable us to sort a vector of PointCorrespondences according to their scores using std::sort (begin(), end(), isBetterCorrespondence);. | |
| std::ostream & | pcl::operator<< (std::ostream &os, const Correspondence &c) |
| overloaded << operator | |