ShapeContext3DEstimation implements the 3D shape context descriptor as described in: More...
#include <3dsc.h>
Public Types | |
| typedef Feature< PointInT, PointOutT >::PointCloudIn | PointCloudIn |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
Public Member Functions | |
| size_t | getAzimuthBins () |
| size_t | getElevationBins () |
| double | getMinimalRadius () |
| double | getPointDensityRadius () |
| size_t | getRadiusBins () |
| void | setAzimuthBins (size_t bins) |
| Set the number of bins along the azimuth to bins. | |
| void | setElevationBins (size_t bins) |
| Set the number of bins along the elevation to bins. | |
| void | setMinimalRadius (double radius) |
| The minimal radius value for the search sphere (rmin) in the original paper. | |
| void | setPointDensityRadius (double radius) |
| This radius is used to compute local point density density = number of points within this radius. | |
| void | setRadiusBins (size_t bins) |
| Set the number of bins along the radii to bins. | |
| ShapeContext3DEstimation (bool random=false) | |
| Constructor. | |
| virtual | ~ShapeContext3DEstimation () |
Protected Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Estimate the actual feature. | |
| bool | computePoint (size_t index, const pcl::PointCloud< PointNT > &normals, float rf[9], std::vector< float > &desc) |
| Estimate a descriptor for a given point. | |
| bool | initCompute () |
| Initialize computation by allocating all the intervals and the volume lookup table. | |
| double | rnd () |
| Boost-based random number generator. | |
| void | shiftAlongAzimuth (size_t block_size, std::vector< float > &desc) |
| Shift computed descriptor "L" times along the azimuthal direction. | |
Protected Attributes | |
| size_t | azimuth_bins_ |
| Bins along the azimuth dimension. | |
| size_t | descriptor_length_ |
| Descriptor length. | |
| size_t | elevation_bins_ |
| Bins along the elevation dimension. | |
| double | min_radius_ |
| Minimal radius value. | |
| std::vector< float > | phi_divisions_ |
| Phi divisions interval. | |
| double | point_density_radius_ |
| Point density radius. | |
| std::vector< float > | radii_interval_ |
| Values of the radii interval. | |
| size_t | radius_bins_ |
| Bins along the radius dimension. | |
| boost::shared_ptr < boost::uniform_01 < boost::mt19937 > > | rng_ |
| Boost-based random number generator distribution. | |
| boost::mt19937 | rng_alg_ |
| Boost-based random number generator algorithm. | |
| std::vector< float > | theta_divisions_ |
| Theta divisions interval. | |
| std::vector< float > | volume_lut_ |
| Volumes look up table. | |
Private Member Functions | |
| void | computeFeatureEigen (pcl::PointCloud< Eigen::MatrixXf > &) |
| Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class. | |
Detailed Description
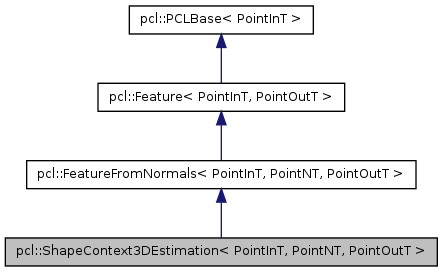
template<typename PointInT, typename PointNT, typename PointOutT = pcl::ShapeContext>
class pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >
ShapeContext3DEstimation implements the 3D shape context descriptor as described in:
- Andrea Frome, Daniel Huber, Ravi Kolluri and Thomas Bülow, Jitendra Malik Recognizing Objects in Range Data Using Regional Point Descriptors, In proceedings of the 8th European Conference on Computer Vision (ECCV), Prague, May 11-14, 2004
The 3DSC computed feature has the following structure
- rf float[9] = x_axis | y_axis | normal and represents the local frame
- desc std::vector<float> which size is determined by the number of bins radius_bins_ + elevation_bins_ + azimuth_bins_. If shift is required then the computed descriptor will be shift along the azimuthal direction.
The pcl::ShapeContext descriptor is the default PointOutT.
- Attention:
- The convention for a 3D shape context descriptor is:
- if a query point's nearest neighbors cannot be estimated, the feature descriptor will be set to NaN (not a number), and the RF to 0
- it is impossible to estimate a 3D shape context descriptor for a point that doesn't have finite 3D coordinates. Therefore, any point that contains NaN data on x, y, or z, will have its boundary feature property set to NaN.
Member Typedef Documentation
| typedef Feature<PointInT, PointOutT>::PointCloudIn pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::PointCloudIn |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::PointCloudOut |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Constructor & Destructor Documentation
| pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::ShapeContext3DEstimation | ( | bool | random = false | ) | [inline] |
| virtual pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::~ShapeContext3DEstimation | ( | ) | [inline, virtual] |
Member Function Documentation
| void pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [protected, virtual] |
Estimate the actual feature.
- Parameters:
-
[out] output the resultant feature
Implements pcl::Feature< PointInT, PointOutT >.
| void pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::computeFeatureEigen | ( | pcl::PointCloud< Eigen::MatrixXf > & | ) | [inline, private, virtual] |
Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class.
- Parameters:
-
[out] output the output point cloud
Implements pcl::Feature< PointInT, PointOutT >.
Reimplemented in pcl::ShapeContext3DEstimation< PointInT, PointNT, Eigen::MatrixXf >.
| bool pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::computePoint | ( | size_t | index, |
| const pcl::PointCloud< PointNT > & | normals, | ||
| float | rf[9], | ||
| std::vector< float > & | desc | ||
| ) | [protected] |
Estimate a descriptor for a given point.
- Parameters:
-
[in] index the index of the point to estimate a descriptor for [in] normals a pointer to the set of normals [in] rf the reference frame [out] desc the resultant estimated descriptor
- Returns:
- true if the descriptor was computed successfully, false if there was an error (e.g. the nearest neighbor didn't return any neighbors)
----- Compute current neighbour polar coordinates ----- Get distance between the neighbour and the origin
Project point into the tangent plane
Normalize to compute the dot product
Compute the angle between the projection and the x axis in the interval [0,360]
Compute the angle between the neighbour and the z axis (normal) in the interval [0, 180]
Accumulate w into correspondant Bin(j,k,l)
| size_t pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::getAzimuthBins | ( | ) | [inline] |
| size_t pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::getElevationBins | ( | ) | [inline] |
| double pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::getMinimalRadius | ( | ) | [inline] |
| double pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::getPointDensityRadius | ( | ) | [inline] |
| size_t pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::getRadiusBins | ( | ) | [inline] |
| bool pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::initCompute | ( | ) | [protected, virtual] |
Initialize computation by allocating all the intervals and the volume lookup table.
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
| double pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::rnd | ( | ) | [inline, protected] |
| void pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::setAzimuthBins | ( | size_t | bins | ) | [inline] |
| void pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::setElevationBins | ( | size_t | bins | ) | [inline] |
| void pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::setMinimalRadius | ( | double | radius | ) | [inline] |
| void pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::setPointDensityRadius | ( | double | radius | ) | [inline] |
| void pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::setRadiusBins | ( | size_t | bins | ) | [inline] |
| void pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::shiftAlongAzimuth | ( | size_t | block_size, |
| std::vector< float > & | desc | ||
| ) | [protected] |
Member Data Documentation
size_t pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::azimuth_bins_ [protected] |
size_t pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::descriptor_length_ [protected] |
size_t pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::elevation_bins_ [protected] |
double pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::min_radius_ [protected] |
std::vector<float> pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::phi_divisions_ [protected] |
double pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::point_density_radius_ [protected] |
std::vector<float> pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::radii_interval_ [protected] |
size_t pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::radius_bins_ [protected] |
boost::shared_ptr<boost::uniform_01<boost::mt19937> > pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::rng_ [protected] |
boost::mt19937 pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::rng_alg_ [protected] |
std::vector<float> pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::theta_divisions_ [protected] |
std::vector<float> pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::volume_lut_ [protected] |
The documentation for this class was generated from the following files: