SampleConsensusModelParallelLine defines a model for 3D line segmentation using additional angular constraints. The model coefficients are defined as: More...
#include <sac_model_parallel_line.h>
Public Types | |
| typedef SampleConsensusModelLine < PointT >::PointCloud | PointCloud |
| typedef SampleConsensusModelLine < PointT >::PointCloudConstPtr | PointCloudConstPtr |
| typedef SampleConsensusModelLine < PointT >::PointCloudPtr | PointCloudPtr |
| typedef boost::shared_ptr < SampleConsensusModelParallelLine > | Ptr |
Public Member Functions | |
| virtual int | countWithinDistance (const Eigen::VectorXf &model_coefficients, const double threshold) |
| Count all the points which respect the given model coefficients as inliers. | |
| Eigen::Vector3f | getAxis () |
| Get the axis along which we need to search for a plane perpendicular to. | |
| void | getDistancesToModel (const Eigen::VectorXf &model_coefficients, std::vector< double > &distances) |
| Compute all squared distances from the cloud data to a given line model. | |
| double | getEpsAngle () |
| Get the angle epsilon (delta) threshold. | |
| pcl::SacModel | getModelType () const |
| Return an unique id for this model (SACMODEL_PARALLEL_LINE). | |
| SampleConsensusModelParallelLine (const PointCloudConstPtr &cloud) | |
| Constructor for base SampleConsensusModelParallelLine. | |
| SampleConsensusModelParallelLine (const PointCloudConstPtr &cloud, const std::vector< int > &indices) | |
| Constructor for base SampleConsensusModelParallelLine. | |
| void | selectWithinDistance (const Eigen::VectorXf &model_coefficients, const double threshold, std::vector< int > &inliers) |
| Select all the points which respect the given model coefficients as inliers. | |
| void | setAxis (const Eigen::Vector3f &ax) |
| Set the axis along which we need to search for a plane perpendicular to. | |
| void | setEpsAngle (const double ea) |
| Set the angle epsilon (delta) threshold. | |
Protected Member Functions | |
| bool | isModelValid (const Eigen::VectorXf &model_coefficients) |
| Check whether a model is valid given the user constraints. | |
Protected Attributes | |
| Eigen::Vector3f | axis_ |
| The axis along which we need to search for a plane perpendicular to. | |
| double | eps_angle_ |
| The maximum allowed difference between the plane normal and the given axis. | |
Detailed Description
template<typename PointT>
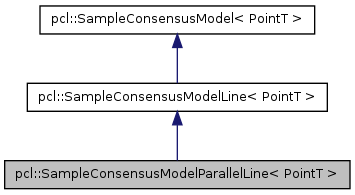
class pcl::SampleConsensusModelParallelLine< PointT >
SampleConsensusModelParallelLine defines a model for 3D line segmentation using additional angular constraints. The model coefficients are defined as:
- point_on_line.x : the X coordinate of a point on the line
- point_on_line.y : the Y coordinate of a point on the line
- point_on_line.z : the Z coordinate of a point on the line
- line_direction.x : the X coordinate of a line's direction
- line_direction.y : the Y coordinate of a line's direction
- line_direction.z : the Z coordinate of a line's direction
Definition at line 62 of file sac_model_parallel_line.h.
Member Typedef Documentation
| typedef SampleConsensusModelLine<PointT>::PointCloud pcl::SampleConsensusModelParallelLine< PointT >::PointCloud |
Reimplemented from pcl::SampleConsensusModelLine< PointT >.
Definition at line 65 of file sac_model_parallel_line.h.
| typedef SampleConsensusModelLine<PointT>::PointCloudConstPtr pcl::SampleConsensusModelParallelLine< PointT >::PointCloudConstPtr |
Reimplemented from pcl::SampleConsensusModelLine< PointT >.
Definition at line 67 of file sac_model_parallel_line.h.
| typedef SampleConsensusModelLine<PointT>::PointCloudPtr pcl::SampleConsensusModelParallelLine< PointT >::PointCloudPtr |
Reimplemented from pcl::SampleConsensusModelLine< PointT >.
Definition at line 66 of file sac_model_parallel_line.h.
| typedef boost::shared_ptr<SampleConsensusModelParallelLine> pcl::SampleConsensusModelParallelLine< PointT >::Ptr |
Reimplemented from pcl::SampleConsensusModelLine< PointT >.
Definition at line 69 of file sac_model_parallel_line.h.
Constructor & Destructor Documentation
| pcl::SampleConsensusModelParallelLine< PointT >::SampleConsensusModelParallelLine | ( | const PointCloudConstPtr & | cloud | ) | [inline] |
Constructor for base SampleConsensusModelParallelLine.
- Parameters:
-
[in] cloud the input point cloud dataset
Definition at line 74 of file sac_model_parallel_line.h.
| pcl::SampleConsensusModelParallelLine< PointT >::SampleConsensusModelParallelLine | ( | const PointCloudConstPtr & | cloud, |
| const std::vector< int > & | indices | ||
| ) | [inline] |
Constructor for base SampleConsensusModelParallelLine.
- Parameters:
-
[in] cloud the input point cloud dataset [in] indices a vector of point indices to be used from cloud
Definition at line 85 of file sac_model_parallel_line.h.
Member Function Documentation
| int pcl::SampleConsensusModelParallelLine< PointT >::countWithinDistance | ( | const Eigen::VectorXf & | model_coefficients, |
| const double | threshold | ||
| ) | [virtual] |
Count all the points which respect the given model coefficients as inliers.
- Parameters:
-
[in] model_coefficients the coefficients of a model that we need to compute distances to [in] threshold maximum admissible distance threshold for determining the inliers from the outliers
- Returns:
- the resultant number of inliers
Reimplemented from pcl::SampleConsensusModelLine< PointT >.
Definition at line 60 of file sac_model_parallel_line.hpp.
| Eigen::Vector3f pcl::SampleConsensusModelParallelLine< PointT >::getAxis | ( | ) | [inline] |
Get the axis along which we need to search for a plane perpendicular to.
Definition at line 100 of file sac_model_parallel_line.h.
| void pcl::SampleConsensusModelParallelLine< PointT >::getDistancesToModel | ( | const Eigen::VectorXf & | model_coefficients, |
| std::vector< double > & | distances | ||
| ) | [virtual] |
Compute all squared distances from the cloud data to a given line model.
- Parameters:
-
[in] model_coefficients the coefficients of a line model that we need to compute distances to [out] distances the resultant estimated squared distances
Reimplemented from pcl::SampleConsensusModelLine< PointT >.
Definition at line 72 of file sac_model_parallel_line.hpp.
| double pcl::SampleConsensusModelParallelLine< PointT >::getEpsAngle | ( | ) | [inline] |
Get the angle epsilon (delta) threshold.
Definition at line 109 of file sac_model_parallel_line.h.
| pcl::SacModel pcl::SampleConsensusModelParallelLine< PointT >::getModelType | ( | ) | const [inline, virtual] |
Return an unique id for this model (SACMODEL_PARALLEL_LINE).
Reimplemented from pcl::SampleConsensusModelLine< PointT >.
Definition at line 141 of file sac_model_parallel_line.h.
| bool pcl::SampleConsensusModelParallelLine< PointT >::isModelValid | ( | const Eigen::VectorXf & | model_coefficients | ) | [protected, virtual] |
Check whether a model is valid given the user constraints.
- Parameters:
-
[in] model_coefficients the set of model coefficients
Reimplemented from pcl::SampleConsensusModelLine< PointT >.
Definition at line 87 of file sac_model_parallel_line.hpp.
| void pcl::SampleConsensusModelParallelLine< PointT >::selectWithinDistance | ( | const Eigen::VectorXf & | model_coefficients, |
| const double | threshold, | ||
| std::vector< int > & | inliers | ||
| ) | [virtual] |
Select all the points which respect the given model coefficients as inliers.
- Parameters:
-
[in] model_coefficients the coefficients of a line model that we need to compute distances to [in] threshold a maximum admissible distance threshold for determining the inliers from the outliers [out] inliers the resultant model inliers
Reimplemented from pcl::SampleConsensusModelLine< PointT >.
Definition at line 45 of file sac_model_parallel_line.hpp.
| void pcl::SampleConsensusModelParallelLine< PointT >::setAxis | ( | const Eigen::Vector3f & | ax | ) | [inline] |
Set the axis along which we need to search for a plane perpendicular to.
- Parameters:
-
[in] ax the axis along which we need to search for a plane perpendicular to
Definition at line 96 of file sac_model_parallel_line.h.
| void pcl::SampleConsensusModelParallelLine< PointT >::setEpsAngle | ( | const double | ea | ) | [inline] |
Set the angle epsilon (delta) threshold.
- Parameters:
-
[in] ea the maximum allowed difference between the plane normal and the given axis.
Definition at line 106 of file sac_model_parallel_line.h.
Member Data Documentation
Eigen::Vector3f pcl::SampleConsensusModelParallelLine< PointT >::axis_ [protected] |
The axis along which we need to search for a plane perpendicular to.
Definition at line 152 of file sac_model_parallel_line.h.
double pcl::SampleConsensusModelParallelLine< PointT >::eps_angle_ [protected] |
The maximum allowed difference between the plane normal and the given axis.
Definition at line 155 of file sac_model_parallel_line.h.
The documentation for this class was generated from the following files: