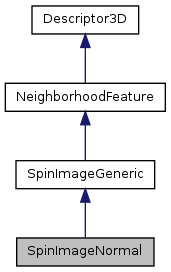
A SpinImageNormal descriptor computes a spin image spinning around the locally extracted normal vector. More...
#include <spin_image_normal.h>
Public Member Functions | |
| virtual void | clearShared () |
| Clears any already-computed spectral information. | |
| std::string | getName () const |
| Returns a string that is unique for the current param settings. | |
| SpinImageNormal () | |
| Instantiates the spin image descriptor to use the given specifications. | |
| SpinImageNormal (const double row_res, const double col_res, const unsigned int nbr_rows, const unsigned int nbr_cols, const bool use_interest_regions_only, SpectralAnalysis &spectral_information) | |
Protected Member Functions | |
| virtual int | precompute (const sensor_msgs::PointCloud &data, cloud_kdtree::KdTree &data_kdtree, const std::vector< const geometry_msgs::Point32 * > &interest_pts) |
| Computes/retrieves the normal for each interest point. | |
| virtual int | precompute (const sensor_msgs::PointCloud &data, cloud_kdtree::KdTree &data_kdtree, const std::vector< const std::vector< int > * > &interest_region_indices) |
| Computes/retrieves the normal for each interest region. | |
Private Attributes | |
| SpectralAnalysis * | spectral_information_ |
Detailed Description
A SpinImageNormal descriptor computes a spin image spinning around the locally extracted normal vector.
The normal vector is the "beta" axis as described in Johnson & Hebert 1999.
Example spin image definition with 3 rows and 4 cols:
beta
^
|_ _ _ _
|_|_|_|_|
x_|_|_|_|
|_|_|_|_|
-----------> alpha
(x = center point of spin image, beta = [normal vector])
The center point of the spin image is the given interest point or the centroid of given regions of interest points
Definition at line 78 of file spin_image_normal.h.
Constructor & Destructor Documentation
| SpinImageNormal::SpinImageNormal | ( | ) | [inline] |
Instantiates the spin image descriptor to use the given specifications.
- Warning:
- The number of rows (nbr_rows) must be odd
- Parameters:
-
row_res The cell resolution along the beta axis col_res The cell resolution along the alpha axis nbr_rows The number of cells along the beta axis nbr_cols The number of cells along the alpha axis use_interest_regions_only When computing for interest regions, true indicates to use only the points within the interest region to compute the spin image spectral_information The class to retrieve the normal vectors from for each interest point/region
Definition at line 98 of file spin_image_normal.h.
| SpinImageNormal::SpinImageNormal | ( | const double | row_res, |
| const double | col_res, | ||
| const unsigned int | nbr_rows, | ||
| const unsigned int | nbr_cols, | ||
| const bool | use_interest_regions_only, | ||
| SpectralAnalysis & | spectral_information | ||
| ) |
Definition at line 42 of file spin_image_normal.cpp.
Member Function Documentation
| void SpinImageNormal::clearShared | ( | ) | [virtual] |
Clears any already-computed spectral information.
Implements Descriptor3D.
Definition at line 81 of file spin_image_normal.cpp.
| string SpinImageNormal::getName | ( | ) | const [virtual] |
Returns a string that is unique for the current param settings.
- Returns:
- the name of this feature.
Implements Descriptor3D.
Definition at line 72 of file spin_image_normal.cpp.
| int SpinImageNormal::precompute | ( | const sensor_msgs::PointCloud & | data, |
| cloud_kdtree::KdTree & | data_kdtree, | ||
| const std::vector< const geometry_msgs::Point32 * > & | interest_pts | ||
| ) | [protected, virtual] |
Computes/retrieves the normal for each interest point.
- Parameters:
-
data The point cloud to process from Descriptor3D::compute() data_kdtree The efficient neighborhood data structure interest_pts The list of interest points to be processed
- Returns:
- 0 on success, otherwise negative value on error
Implements Descriptor3D.
Definition at line 89 of file spin_image_normal.cpp.
| int SpinImageNormal::precompute | ( | const sensor_msgs::PointCloud & | data, |
| cloud_kdtree::KdTree & | data_kdtree, | ||
| const std::vector< const std::vector< int > * > & | interest_region_indices | ||
| ) | [protected, virtual] |
Computes/retrieves the normal for each interest region.
- Parameters:
-
data The point cloud to process from Descriptor3D::compute() data_kdtree The efficient neighborhood data structure interest_pts The list of interest points to be processed
- Returns:
- 0 on success, otherwise negative value on error
Implements Descriptor3D.
Definition at line 133 of file spin_image_normal.cpp.
Member Data Documentation
Definition at line 147 of file spin_image_normal.h.
The documentation for this class was generated from the following files: