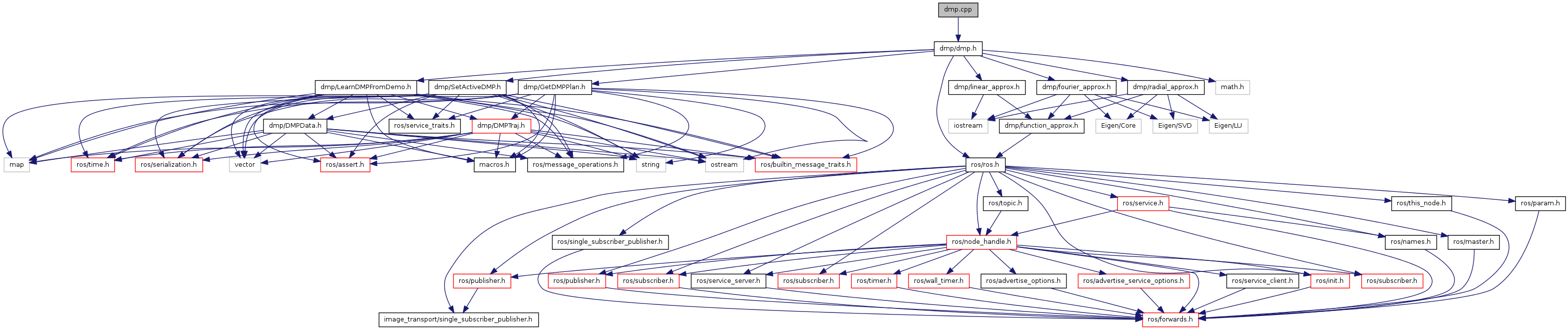
#include "dmp/dmp.h"
Include dependency graph for dmp.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | dmp |
Defines | |
| #define | MAX_PLAN_LENGTH 1000 |
Functions | |
| double | dmp::calcPhase (double curr_time, double tau) |
| Calculate an exp-decaying 1 to 0 phase based on time and the time scaling constant tau. | |
| void | dmp::generatePlan (const vector< DMPData > &dmp_list, const vector< double > &x_0, const vector< double > &x_dot_0, const double &t_0, const vector< double > &goal, const vector< double > &goal_thresh, const double &seg_length, const double &tau, const double &total_dt, const int &integrate_iter, DMPTraj &plan, uint8_t &at_goal) |
| Use the current active multi-dim DMP to create a plan starting from x_0 toward a goal. | |
| void | dmp::learnFromDemo (const DMPTraj &demo, const vector< double > &k_gains, const vector< double > &d_gains, const int &num_bases, vector< DMPData > &dmp_list) |
| Given a single demo trajectory, produces a multi-dim DMP. | |
Variables | |
| double | dmp::alpha = -log(0.01) |
Define Documentation
| #define MAX_PLAN_LENGTH 1000 |