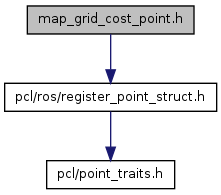
#include <pcl/ros/register_point_struct.h>
Include dependency graph for map_grid_cost_point.h:
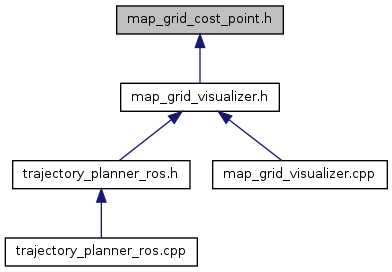
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | base_local_planner::MapGridCostPoint |
Namespaces | |
| namespace | base_local_planner |
Functions | |
| POINT_CLOUD_REGISTER_POINT_STRUCT (base_local_planner::MapGridCostPoint,(float, x, x)(float, y, y)(float, z, z)(float, path_cost, path_cost)(float, goal_cost, goal_cost)(float, occ_cost, occ_cost)(float, total_cost, total_cost)) | |
Function Documentation
| POINT_CLOUD_REGISTER_POINT_STRUCT | ( | base_local_planner::MapGridCostPoint | , |
| (float, x, x)(float, y, y)(float, z, z)(float, path_cost, path_cost)(float, goal_cost, goal_cost)(float, occ_cost, occ_cost)(float, total_cost, total_cost) | |||
| ) |