Provides an interface for critics of trajectories During each sampling run, a batch of many trajectories will be scored using such a cost function. The prepare method is called before each batch run, and then for each trajectory of the sampling set, score_trajectory may be called. More...
#include <trajectory_cost_function.h>
Public Member Functions | |
| double | getScale () |
| virtual bool | prepare ()=0 |
| virtual double | scoreTrajectory (Trajectory &traj)=0 |
| void | setScale (double scale) |
| virtual | ~TrajectoryCostFunction () |
Protected Member Functions | |
| TrajectoryCostFunction (double scale=1.0) | |
Private Attributes | |
| double | scale_ |
Detailed Description
Provides an interface for critics of trajectories During each sampling run, a batch of many trajectories will be scored using such a cost function. The prepare method is called before each batch run, and then for each trajectory of the sampling set, score_trajectory may be called.
Definition at line 52 of file trajectory_cost_function.h.
Constructor & Destructor Documentation
| virtual base_local_planner::TrajectoryCostFunction::~TrajectoryCostFunction | ( | ) | [inline, virtual] |
Definition at line 75 of file trajectory_cost_function.h.
| base_local_planner::TrajectoryCostFunction::TrajectoryCostFunction | ( | double | scale = 1.0 | ) | [inline, protected] |
Definition at line 78 of file trajectory_cost_function.h.
Member Function Documentation
| double base_local_planner::TrajectoryCostFunction::getScale | ( | ) | [inline] |
Definition at line 67 of file trajectory_cost_function.h.
| virtual bool base_local_planner::TrajectoryCostFunction::prepare | ( | ) | [pure virtual] |
General updating of context values if required. Subclasses may overwrite. Return false in case there is any error.
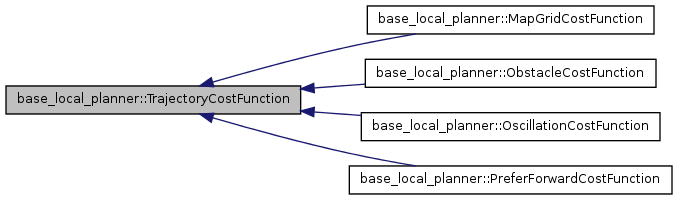
Implemented in base_local_planner::MapGridCostFunction, base_local_planner::ObstacleCostFunction, base_local_planner::OscillationCostFunction, and base_local_planner::PreferForwardCostFunction.
| virtual double base_local_planner::TrajectoryCostFunction::scoreTrajectory | ( | Trajectory & | traj | ) | [pure virtual] |
return a score for trajectory traj
Implemented in base_local_planner::MapGridCostFunction, base_local_planner::ObstacleCostFunction, base_local_planner::OscillationCostFunction, and base_local_planner::PreferForwardCostFunction.
| void base_local_planner::TrajectoryCostFunction::setScale | ( | double | scale | ) | [inline] |
Definition at line 71 of file trajectory_cost_function.h.
Member Data Documentation
double base_local_planner::TrajectoryCostFunction::scale_ [private] |
Definition at line 81 of file trajectory_cost_function.h.
The documentation for this class was generated from the following file: