#include "TrajectoryInput.hpp"#include <telekyb_base/ROS.hpp>#include <telekyb_msgs/TKTrajectory.h>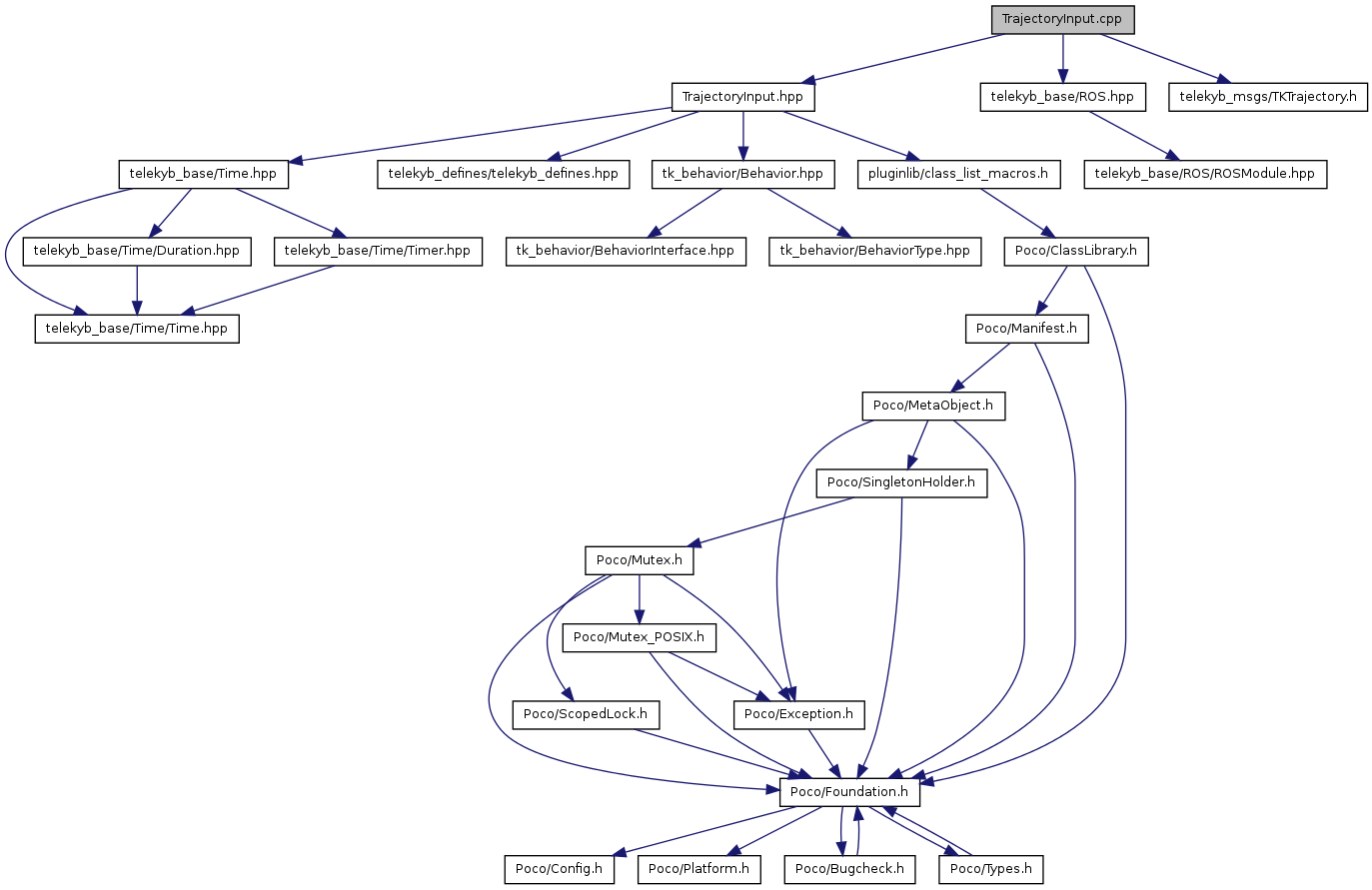
Go to the source code of this file.
Namespaces | |
| namespace | telekyb_behavior |
Functions | |
| PLUGINLIB_DECLARE_CLASS (tk_be_common, TrajectoryInput, telekyb_behavior::TrajectoryInput, TELEKYB_NAMESPACE::Behavior) | |
| PLUGINLIB_DECLARE_CLASS | ( | tk_be_common | , |
| TrajectoryInput | , | ||
| telekyb_behavior::TrajectoryInput | , | ||
| TELEKYB_NAMESPACE::Behavior | |||
| ) |

