#include <ros/ros.h>#include <vision_srvs/cop_call.h>#include <vision_srvs/srvjlo.h>#include <vision_msgs/cop_answer.h>#include <stdio.h>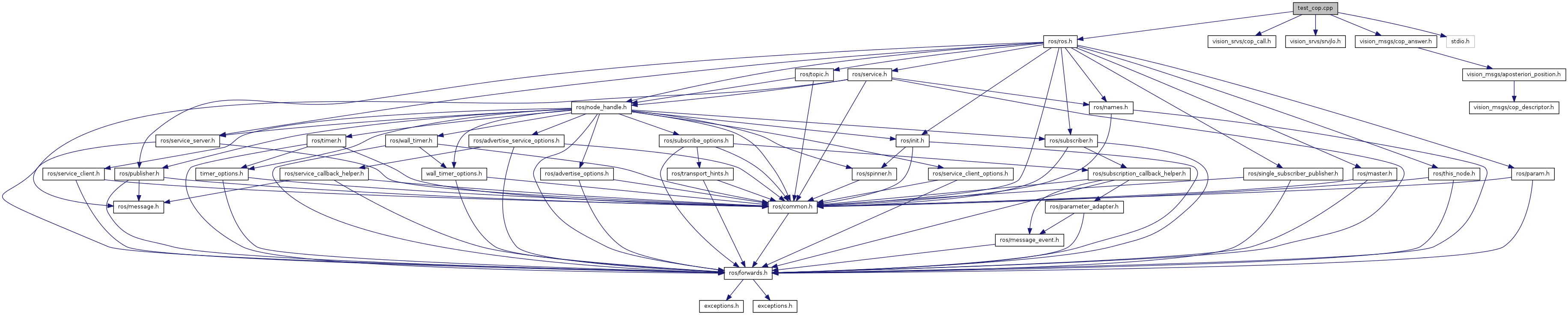
Go to the source code of this file.
Functions | |
| void | callback (const boost::shared_ptr< const cop_answer > &msg) |
| int | main (int argc, char *argv[]) |
Variables | |
| bool | breaker = false |
| unsigned long | vision_primitive = 0 |
| void callback | ( | const boost::shared_ptr< const cop_answer > & | msg | ) |
Definition at line 42 of file test_cop.cpp.
Advertise the topic? should be subscibed already by cop
Create the cop_call msg
subscribe to the topic cop should publish the results
Publish
Definition at line 67 of file test_cop.cpp.
Definition at line 39 of file test_cop.cpp.
| unsigned long vision_primitive = 0 |
Definition at line 40 of file test_cop.cpp.

