#include <rtcRotation2D.h>
Public Member Functions | |
| void | apply (Vec2< T > &v) const |
| Helper for applying the rotation to points: Rotation2D * Vec2. | |
| Vec2< T > | apply (const Vec2< T > &v) const |
| T | getTheta () |
| Accessors. | |
| Rotation2D () | |
| Constructor. | |
| Rotation2D (const T x11, const T x12, const T x21, const T x22) | |
| Rotation2D (const Mat< T, 2, 2 > &m) | |
| Rotation2D (const T &theta) | |
| void | set (const T &theta) |
| Mutators. | |
Detailed Description
template<class T>
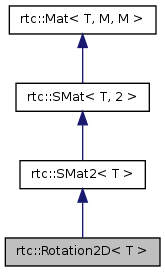
class rtc::Rotation2D< T >
The Rotation Matrix Class
Defines rotation matrix class that derives from SMat<T,2>.
A coordinate rotation is a rotation about a single coordinate axis. Enumerating the x- and y-axes with 1 and 2 the coordinate rotations are:
Definition at line 44 of file rtcRotation2D.h.
Constructor & Destructor Documentation
| rtc::Rotation2D< T >::Rotation2D | ( | ) | [inline] |
Constructor.
Ctor that intializes to an identity rotation matrix.
Definition at line 81 of file rtcRotation2D.h.
| rtc::Rotation2D< T >::Rotation2D | ( | const T | x11, |
| const T | x12, | ||
| const T | x21, | ||
| const T | x22 | ||
| ) | [inline] |
Ctor that initializes matrix entries directly.
Definition at line 89 of file rtcRotation2D.h.
| rtc::Rotation2D< T >::Rotation2D | ( | const Mat< T, 2, 2 > & | m | ) | [inline] |
Ctor that initializes from Mat<T,2,2>.
Definition at line 98 of file rtcRotation2D.h.
| rtc::Rotation2D< T >::Rotation2D | ( | const T & | theta | ) | [inline] |
Ctor that builds a rotation matrix from euler angles
Definition at line 103 of file rtcRotation2D.h.
Member Function Documentation
| void rtc::Rotation2D< T >::apply | ( | Vec2< T > & | v | ) | const [inline] |
Helper for applying the rotation to points: Rotation2D * Vec2.
Helper for applying the rotation to points: Rotation2D * Vec2
Definition at line 131 of file rtcRotation2D.h.
| Vec2< T > rtc::Rotation2D< T >::apply | ( | const Vec2< T > & | v | ) | const [inline] |
Helper for applying the rotation to points: Rotation2D * Vec2
Definition at line 138 of file rtcRotation2D.h.
| T rtc::Rotation2D< T >::getTheta | ( | ) | [inline] |
Accessors.
Definition at line 124 of file rtcRotation2D.h.
| void rtc::Rotation2D< T >::set | ( | const T & | theta | ) | [inline] |
Mutators.
Set the rotation matrix according to passed euler angles
Definition at line 115 of file rtcRotation2D.h.
The documentation for this class was generated from the following file: