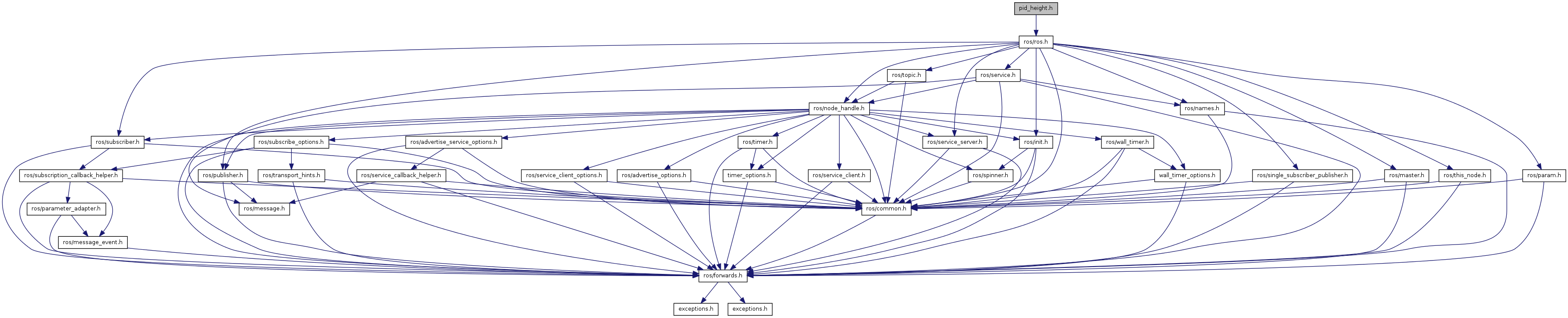
#include "ros/ros.h"
Include dependency graph for pid_height.h:
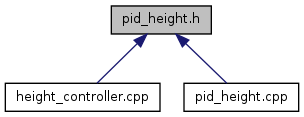
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | Height_str |
| struct | Reference |
Enumerations | |
| enum | { P_GAIN, I_GAIN, D_GAIN, I_MAX, I_MIN } |
Functions | |
| double | PID_height (double desired_height, Height_str Height, double height_gain[5], double t, double Mass, double roll, double pitch, ros::Publisher AccZ) |
| void | ZKalman_Init (void) |
| double | ZKalman_newZMeasurement (double z, double zdd) |
Enumeration Type Documentation
| anonymous enum |
Definition at line 3 of file pid_height.h.
Function Documentation
| double PID_height | ( | double | desired_height, |
| Height_str | Height, | ||
| double | height_gain[5], | ||
| double | t, | ||
| double | Mass, | ||
| double | roll, | ||
| double | pitch, | ||
| ros::Publisher | AccZ | ||
| ) |
Definition at line 91 of file pid_height.cpp.
| void ZKalman_Init | ( | void | ) |
Definition at line 39 of file pid_height.cpp.
| double ZKalman_newZMeasurement | ( | double | z, |
| double | zdd | ||
| ) |
Definition at line 60 of file pid_height.cpp.