#include "quad_height/pid_height.h"#include <math.h>#include "mav_msgs/Height.h"#include <Eigen/Eigen>#include <Eigen/LU>#include <std_msgs/Float64.h>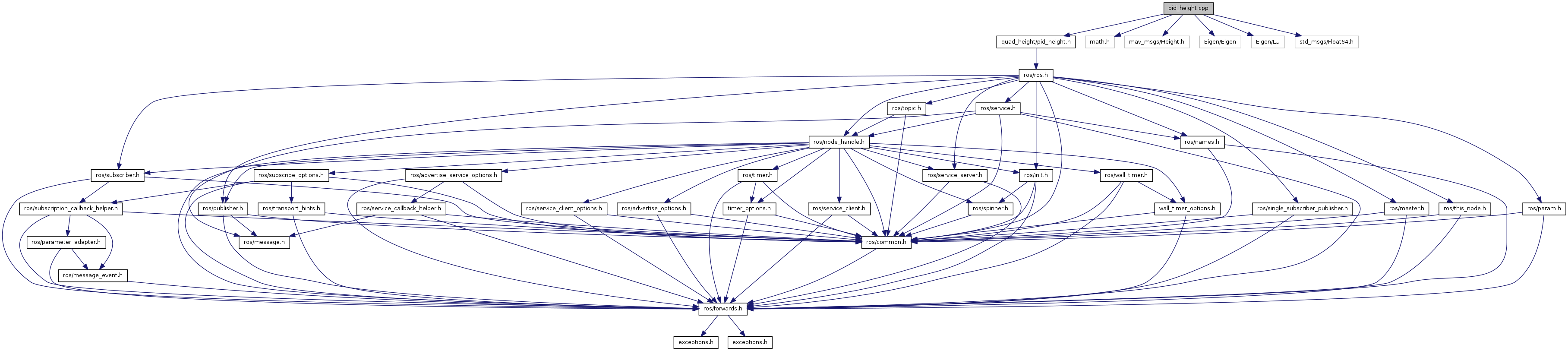
Go to the source code of this file.
Defines | |
| #define | _delta 6.74 |
| #define | _Ts 0.1 |
Typedefs | |
| typedef Eigen::Matrix< double, 4, 4 > | MetState |
| typedef Eigen::Matrix< double, 4, 1 > | VecState |
Functions | |
| double | PID_height (double desired_height, Height_str Height, double height_gain[5], double t, double Mass, double roll, double pitch, ros::Publisher AccZ_pub) |
| int | ThrustConversion (double AccZ, double Mass) |
| void | ZKalman_Init () |
| double | ZKalman_newZMeasurement (double z, double zdd) |
Variables | |
| MetState | A |
| VecState | B |
| Eigen::Matrix< double, 1, 4 > | C |
| double | d_term |
| double | i_error = 0 |
| double | i_term |
| bool | initialized = false |
| Eigen::Matrix< double, 4, 1 > | K |
| double | Meas |
| MetState | P |
| double | p_term |
| MetState | Q |
| double | R |
| double | resid |
| double | ThrustCoefA = 0.102613151321317 |
| double | ThrustCoefB = 3.352893193381934 |
| double | ThrustMax = 23.2472 |
| double | ThrustMin = 6.5241 |
| double | U = 0 |
| VecState | xhat |
Define Documentation
| #define _delta 6.74 |
Definition at line 11 of file pid_height.cpp.
| #define _Ts 0.1 |
Definition at line 10 of file pid_height.cpp.
Typedef Documentation
| typedef Eigen::Matrix<double, 4, 4> MetState |
Definition at line 30 of file pid_height.cpp.
| typedef Eigen::Matrix<double, 4, 1> VecState |
Definition at line 29 of file pid_height.cpp.
Function Documentation
| double PID_height | ( | double | desired_height, |
| Height_str | Height, | ||
| double | height_gain[5], | ||
| double | t, | ||
| double | Mass, | ||
| double | roll, | ||
| double | pitch, | ||
| ros::Publisher | AccZ_pub | ||
| ) |
Definition at line 91 of file pid_height.cpp.
| int ThrustConversion | ( | double | AccZ, |
| double | Mass | ||
| ) |
Definition at line 81 of file pid_height.cpp.
| void ZKalman_Init | ( | void | ) |
Definition at line 39 of file pid_height.cpp.
| double ZKalman_newZMeasurement | ( | double | z, |
| double | zdd | ||
| ) |
Definition at line 60 of file pid_height.cpp.
Variable Documentation
Definition at line 33 of file pid_height.cpp.
Definition at line 32 of file pid_height.cpp.
| Eigen::Matrix<double, 1, 4> C |
Definition at line 35 of file pid_height.cpp.
| double d_term |
Definition at line 16 of file pid_height.cpp.
| double i_error = 0 |
Definition at line 21 of file pid_height.cpp.
| double i_term |
Definition at line 16 of file pid_height.cpp.
| bool initialized = false |
Definition at line 13 of file pid_height.cpp.
| Eigen::Matrix<double, 4, 1> K |
Definition at line 34 of file pid_height.cpp.
| double Meas |
Definition at line 36 of file pid_height.cpp.
Definition at line 33 of file pid_height.cpp.
| double p_term |
Definition at line 16 of file pid_height.cpp.
Definition at line 33 of file pid_height.cpp.
| double R |
Definition at line 36 of file pid_height.cpp.
| double resid |
Definition at line 36 of file pid_height.cpp.
| double ThrustCoefA = 0.102613151321317 |
Definition at line 19 of file pid_height.cpp.
| double ThrustCoefB = 3.352893193381934 |
Definition at line 20 of file pid_height.cpp.
| double ThrustMax = 23.2472 |
Definition at line 17 of file pid_height.cpp.
| double ThrustMin = 6.5241 |
Definition at line 18 of file pid_height.cpp.
| double U = 0 |
Definition at line 22 of file pid_height.cpp.
Definition at line 32 of file pid_height.cpp.