#include "ros/ros.h"#include "terminal_tools/parse.h"#include "pcl/io/pcd_io.h"#include "pcl_visualization/pcl_visualizer.h"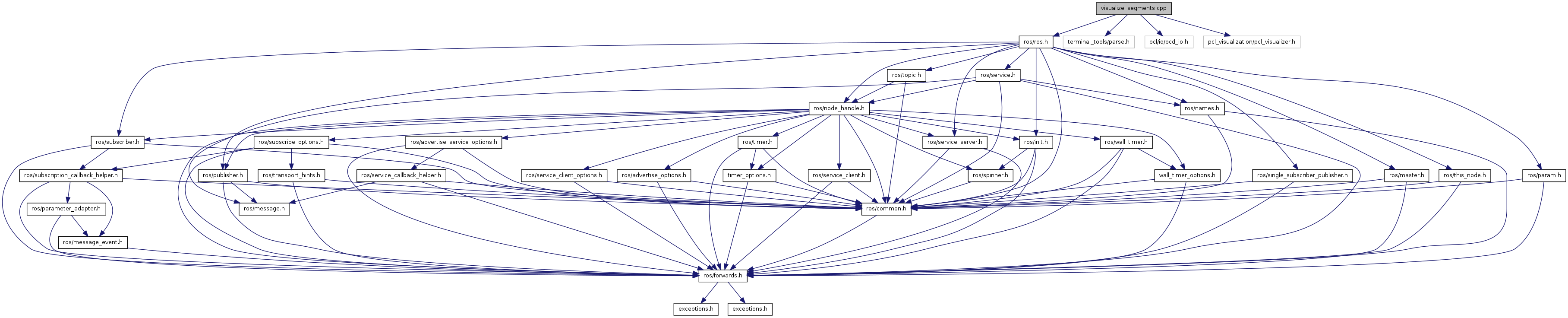
Go to the source code of this file.
Typedefs | |
| typedef pcl::PointXYZ | PointT |
Functions | |
| int | main (int argc, char **argv) |
| Main routine of the method. Segmentation of planar surface and handle. | |
Variables | |
| bool | clean = false |
| int | size_of_hull = 10 |
| int | size_of_projected = 1 |
| bool | step = false |
| bool | verbose = false |
| typedef pcl::PointXYZ PointT |
Definition at line 55 of file visualize_segments.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Main routine of the method. Segmentation of planar surface and handle.
*
*
Definition at line 71 of file visualize_segments.cpp.
Definition at line 61 of file visualize_segments.cpp.
| int size_of_hull = 10 |
Definition at line 63 of file visualize_segments.cpp.
| int size_of_projected = 1 |
Definition at line 64 of file visualize_segments.cpp.
Definition at line 60 of file visualize_segments.cpp.
Definition at line 62 of file visualize_segments.cpp.

