#include <iostream>#include <boost/thread/thread.hpp>#include <boost/date_time.hpp>#include <boost/thread/locks.hpp>#include "ros/ros.h"#include "ros/service.h"#include "ros/service_server.h"#include "sensor_msgs/JointState.h"#include "BHand/BHand.h"#include "controlAllegroHand.h"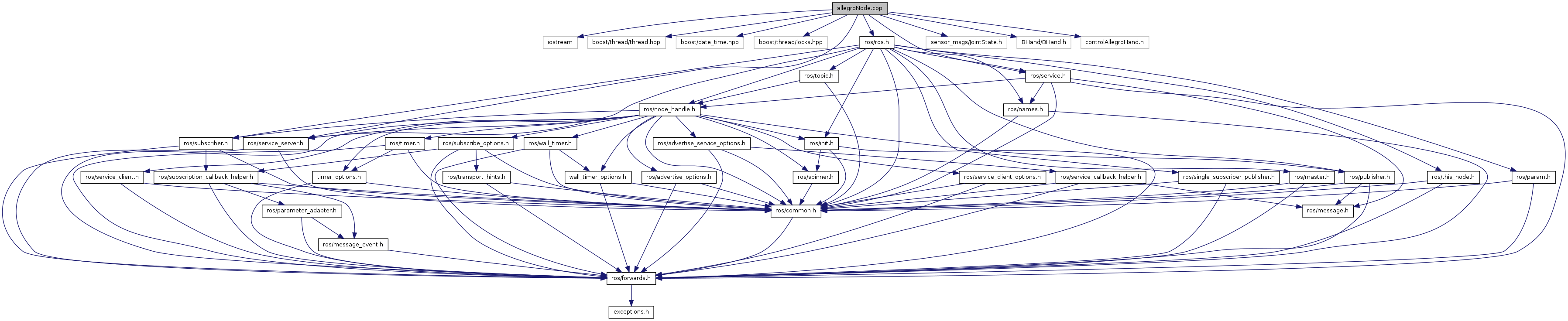
Go to the source code of this file.
Defines | |
| #define | JOINT_CMD_TOPIC "/allegro/joint_cmd" |
| #define | JOINT_STATE_TOPIC "/allegro/joint_state" |
Functions | |
| int | main (int argc, char **argv) |
| void | SetjointCallback (const sensor_msgs::JointState &msg) |
| void | timerCallback (const ros::TimerEvent &event) |
Variables | |
| controlAllegroHand * | canDevice |
| double | curr_position [DOF_JOINTS] |
| double | curr_position_pre [DOF_JOINTS] |
| double | curr_torque [DOF_JOINTS] |
| double | curr_velocity [DOF_JOINTS] |
| double | desire_position [DOF_JOINTS] |
| double | desire_torque [DOF_JOINTS] |
| double | dt |
| FILE * | fid |
| FILE * | fidTime |
| int | frame = 0 |
| eMotionType | gMotionType = eMotionType_NONE |
| ros::Subscriber | joint_cmd_sub |
| ros::Publisher | joint_state_pub |
| int | kill = false |
| BHand | lBHand (eHandType_Right) |
| int | lEmergencyStop = 0 |
| bool | lIsBegin = false |
| sensor_msgs::JointState | msgJoint |
| boost::mutex * | mutex |
| double | out_torque [DOF_JOINTS] |
| double | secs |
| ros::Time | tnow |
| ros::Time | tstart |
| #define JOINT_CMD_TOPIC "/allegro/joint_cmd" |
Definition at line 26 of file allegroNode.cpp.
| #define JOINT_STATE_TOPIC "/allegro/joint_state" |
Definition at line 25 of file allegroNode.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 161 of file allegroNode.cpp.
| void SetjointCallback | ( | const sensor_msgs::JointState & | msg | ) |
Definition at line 67 of file allegroNode.cpp.
| void timerCallback | ( | const ros::TimerEvent & | event | ) |
Definition at line 80 of file allegroNode.cpp.
Definition at line 65 of file allegroNode.cpp.
| double curr_position[DOF_JOINTS] |
Definition at line 28 of file allegroNode.cpp.
| double curr_position_pre[DOF_JOINTS] |
Definition at line 29 of file allegroNode.cpp.
| double curr_torque[DOF_JOINTS] |
Definition at line 31 of file allegroNode.cpp.
| double curr_velocity[DOF_JOINTS] |
Definition at line 30 of file allegroNode.cpp.
| double desire_position[DOF_JOINTS] |
Definition at line 32 of file allegroNode.cpp.
| double desire_torque[DOF_JOINTS] |
Definition at line 33 of file allegroNode.cpp.
| double dt |
Definition at line 42 of file allegroNode.cpp.
| FILE* fid |
Definition at line 47 of file allegroNode.cpp.
| FILE* fidTime |
Definition at line 48 of file allegroNode.cpp.
| int frame = 0 |
Definition at line 39 of file allegroNode.cpp.
Definition at line 62 of file allegroNode.cpp.
Definition at line 53 of file allegroNode.cpp.
Definition at line 52 of file allegroNode.cpp.
| int kill = false |
Definition at line 45 of file allegroNode.cpp.
| int lEmergencyStop = 0 |
Definition at line 40 of file allegroNode.cpp.
| bool lIsBegin = false |
Definition at line 44 of file allegroNode.cpp.
| sensor_msgs::JointState msgJoint |
Definition at line 54 of file allegroNode.cpp.
Definition at line 50 of file allegroNode.cpp.
| double out_torque[DOF_JOINTS] |
Definition at line 37 of file allegroNode.cpp.
| double secs |
Definition at line 35 of file allegroNode.cpp.
Definition at line 57 of file allegroNode.cpp.
Definition at line 56 of file allegroNode.cpp.

