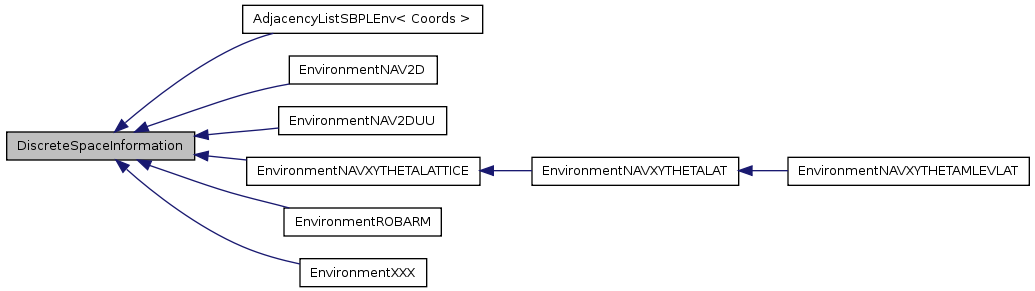
base class for environments defining planning graphs It is independent of the graph search used The main means of communication between environment and graph search is through stateID. Each state is uniquely defined by stateID and graph search is ONLY aware of stateIDs. It doesn't know anything about the actual state variables. Environment, on the other hand, maintains a mapping from stateID to actual state variables (coordinates) using StateID2IndexMapping array More...
#include <environment.h>
Public Member Functions | |
| virtual bool | AreEquivalent (int StateID1, int StateID2) |
| returns true if two states meet the same condition, brief this is used in some planners to figure out if two states are the same in some lower-dimensional manifold for example, in robotarm planning, two states could be equivalent if their end effectors are at the same position unless overwritten in a child class, this function is not implemented | |
| DiscreteSpaceInformation () | |
| constructor | |
| virtual void | EnsureHeuristicsUpdated (bool bGoalHeuristics) |
| checks the heuristics for consistency (some environments do not support this debugging call) | |
| virtual std::vector< int > | GetExpandedStates () |
| virtual int | GetFromToHeuristic (int FromStateID, int ToStateID)=0 |
| heuristic estimate from state FromStateID to state ToStateID | |
| virtual int | GetGoalHeuristic (int stateID)=0 |
| heuristic estimate from state with stateID to goal state | |
| virtual void | GetPreds (int TargetStateID, std::vector< int > *PredIDV, std::vector< int > *CostV)=0 |
| see comments for GetSuccs functon | |
| virtual void | GetRandomPredsatDistance (int TargetStateID, std::vector< int > *PredIDV, std::vector< int > *CLowV) |
| see comments for GetRandomSuccsatDistance | |
| virtual void | GetRandomSuccsatDistance (int SourceStateID, std::vector< int > *SuccIDV, std::vector< int > *CLowV) |
| the following two functions generate succs/preds at some domain-dependent distance. The number of generated succs/preds is up to the environment. NOTE: they MUST generate goal state as a succ/pred if it is within the distance from the state CLowV is the corresponding vector of lower bounds on the costs from the state to the successor states (or vice versa for preds function) unless overwritten in a child class, this function is not implemented | |
| virtual int | GetStartHeuristic (int stateID)=0 |
| heuristic estimate from start state to state with stateID | |
| virtual void | GetSuccs (int SourceStateID, std::vector< int > *SuccIDV, std::vector< int > *CostV)=0 |
| depending on the search used, it may call GetSuccs function (for forward search) or GetPreds function (for backward search) or both (for incremental search). At least one of this functions should be implemented (otherwise, there will be no search to run) Some searches may also use SetAllActionsandAllOutcomes or SetAllPreds functions if they keep the pointers to successors (predecessors) but most searches do not require this, so it is not necessary to support this | |
| virtual bool | InitializeEnv (const char *sEnvFile)=0 |
| initialization environment from file (see .cfg files for examples) | |
| virtual bool | InitializeMDPCfg (MDPConfig *MDPCfg)=0 |
| initialization of MDP data structure | |
| virtual void | PrintEnv_Config (FILE *fOut)=0 |
| prints environment config file | |
| virtual void | PrintState (int stateID, bool bVerbose, FILE *fOut=NULL)=0 |
| prints the state variables for a state with stateID | |
| virtual void | SetAllActionsandAllOutcomes (CMDPSTATE *state)=0 |
| see comments for GetSuccs functon | |
| virtual void | SetAllPreds (CMDPSTATE *state)=0 |
| see comments for GetSuccs functon | |
| virtual bool | SetEnvParameter (const char *parameter, int value) |
| sets a parameter to a value. The set of supported parameters depends on the particular environment | |
| virtual int | SizeofCreatedEnv ()=0 |
| returns the number of states (hashentries) created | |
| virtual | ~DiscreteSpaceInformation () |
| destructor | |
Public Attributes | |
| FILE * | fDeb |
| debugging file | |
| std::vector< int * > | StateID2IndexMapping |
| mapping from hashentry stateID (used in environment to contain the coordinates of a state, say x,y or x,y,theta) to an array of state indices used in searches. If a single search is done, then it is a single entry. So StateID2IndexMapping[100][0] = 5 means that hashentry with stateID 100 is mapped onto search index = 5 in search 0 The value of -1 means that no search state has been created yet for this hashentry | |
base class for environments defining planning graphs It is independent of the graph search used The main means of communication between environment and graph search is through stateID. Each state is uniquely defined by stateID and graph search is ONLY aware of stateIDs. It doesn't know anything about the actual state variables. Environment, on the other hand, maintains a mapping from stateID to actual state variables (coordinates) using StateID2IndexMapping array
Definition at line 38 of file environment.h.
| virtual DiscreteSpaceInformation::~DiscreteSpaceInformation | ( | ) | [inline, virtual] |
destructor
Definition at line 156 of file environment.h.
| DiscreteSpaceInformation::DiscreteSpaceInformation | ( | ) | [inline] |
constructor
Definition at line 168 of file environment.h.
| virtual bool DiscreteSpaceInformation::AreEquivalent | ( | int | StateID1, | |
| int | StateID2 | |||
| ) | [inline, virtual] |
returns true if two states meet the same condition, brief this is used in some planners to figure out if two states are the same in some lower-dimensional manifold for example, in robotarm planning, two states could be equivalent if their end effectors are at the same position unless overwritten in a child class, this function is not implemented
Reimplemented in EnvironmentNAV2D, and EnvironmentROBARM.
Definition at line 119 of file environment.h.
| virtual void DiscreteSpaceInformation::EnsureHeuristicsUpdated | ( | bool | bGoalHeuristics | ) | [inline, virtual] |
checks the heuristics for consistency (some environments do not support this debugging call)
Reimplemented in EnvironmentNAVXYTHETALATTICE.
Definition at line 145 of file environment.h.
| virtual std::vector<int> DiscreteSpaceInformation::GetExpandedStates | ( | ) | [inline, virtual] |
NOTE - for debugging door planner - ben 8.31.09
Definition at line 107 of file environment.h.
| virtual int DiscreteSpaceInformation::GetFromToHeuristic | ( | int | FromStateID, | |
| int | ToStateID | |||
| ) | [pure virtual] |
heuristic estimate from state FromStateID to state ToStateID
Implemented in EnvironmentNAV2D, EnvironmentNAV2DUU, EnvironmentNAVXYTHETALATTICE, EnvironmentNAVXYTHETALAT, AdjacencyListSBPLEnv< Coords >, EnvironmentROBARM, and EnvironmentXXX.
| virtual int DiscreteSpaceInformation::GetGoalHeuristic | ( | int | stateID | ) | [pure virtual] |
heuristic estimate from state with stateID to goal state
Implemented in EnvironmentNAV2D, EnvironmentNAV2DUU, EnvironmentNAVXYTHETALATTICE, EnvironmentNAVXYTHETALAT, AdjacencyListSBPLEnv< Coords >, EnvironmentROBARM, and EnvironmentXXX.
| virtual void DiscreteSpaceInformation::GetPreds | ( | int | TargetStateID, | |
| std::vector< int > * | PredIDV, | |||
| std::vector< int > * | CostV | |||
| ) | [pure virtual] |
see comments for GetSuccs functon
| virtual void DiscreteSpaceInformation::GetRandomPredsatDistance | ( | int | TargetStateID, | |
| std::vector< int > * | PredIDV, | |||
| std::vector< int > * | CLowV | |||
| ) | [inline, virtual] |
see comments for GetRandomSuccsatDistance
Reimplemented in EnvironmentNAV2D.
Definition at line 136 of file environment.h.
| virtual void DiscreteSpaceInformation::GetRandomSuccsatDistance | ( | int | SourceStateID, | |
| std::vector< int > * | SuccIDV, | |||
| std::vector< int > * | CLowV | |||
| ) | [inline, virtual] |
the following two functions generate succs/preds at some domain-dependent distance. The number of generated succs/preds is up to the environment. NOTE: they MUST generate goal state as a succ/pred if it is within the distance from the state CLowV is the corresponding vector of lower bounds on the costs from the state to the successor states (or vice versa for preds function) unless overwritten in a child class, this function is not implemented
Reimplemented in EnvironmentNAV2D, and EnvironmentROBARM.
Definition at line 129 of file environment.h.
| virtual int DiscreteSpaceInformation::GetStartHeuristic | ( | int | stateID | ) | [pure virtual] |
heuristic estimate from start state to state with stateID
Implemented in EnvironmentNAV2D, EnvironmentNAV2DUU, EnvironmentNAVXYTHETALATTICE, EnvironmentNAVXYTHETALAT, AdjacencyListSBPLEnv< Coords >, EnvironmentROBARM, and EnvironmentXXX.
| virtual void DiscreteSpaceInformation::GetSuccs | ( | int | SourceStateID, | |
| std::vector< int > * | SuccIDV, | |||
| std::vector< int > * | CostV | |||
| ) | [pure virtual] |
depending on the search used, it may call GetSuccs function (for forward search) or GetPreds function (for backward search) or both (for incremental search). At least one of this functions should be implemented (otherwise, there will be no search to run) Some searches may also use SetAllActionsandAllOutcomes or SetAllPreds functions if they keep the pointers to successors (predecessors) but most searches do not require this, so it is not necessary to support this
| virtual bool DiscreteSpaceInformation::InitializeEnv | ( | const char * | sEnvFile | ) | [pure virtual] |
initialization environment from file (see .cfg files for examples)
Implemented in EnvironmentNAV2D, EnvironmentNAV2DUU, EnvironmentNAVXYTHETALATTICE, AdjacencyListSBPLEnv< Coords >, EnvironmentROBARM, and EnvironmentXXX.
| virtual bool DiscreteSpaceInformation::InitializeMDPCfg | ( | MDPConfig * | MDPCfg | ) | [pure virtual] |
initialization of MDP data structure
Implemented in EnvironmentNAV2D, EnvironmentNAV2DUU, EnvironmentNAVXYTHETALATTICE, AdjacencyListSBPLEnv< Coords >, EnvironmentROBARM, and EnvironmentXXX.
| virtual void DiscreteSpaceInformation::PrintEnv_Config | ( | FILE * | fOut | ) | [pure virtual] |
prints environment config file
Implemented in EnvironmentNAV2D, EnvironmentNAV2DUU, EnvironmentNAVXYTHETALATTICE, AdjacencyListSBPLEnv< Coords >, EnvironmentROBARM, and EnvironmentXXX.
| virtual void DiscreteSpaceInformation::PrintState | ( | int | stateID, | |
| bool | bVerbose, | |||
| FILE * | fOut = NULL | |||
| ) | [pure virtual] |
prints the state variables for a state with stateID
Implemented in EnvironmentNAV2D, EnvironmentNAV2DUU, EnvironmentNAVXYTHETALAT, AdjacencyListSBPLEnv< Coords >, EnvironmentROBARM, and EnvironmentXXX.
| virtual void DiscreteSpaceInformation::SetAllActionsandAllOutcomes | ( | CMDPSTATE * | state | ) | [pure virtual] |
see comments for GetSuccs functon
Implemented in EnvironmentNAV2D, EnvironmentNAV2DUU, EnvironmentNAVXYTHETALATTICE, EnvironmentNAVXYTHETALAT, AdjacencyListSBPLEnv< Coords >, EnvironmentROBARM, and EnvironmentXXX.
| virtual void DiscreteSpaceInformation::SetAllPreds | ( | CMDPSTATE * | state | ) | [pure virtual] |
see comments for GetSuccs functon
Implemented in EnvironmentNAV2D, EnvironmentNAV2DUU, EnvironmentNAVXYTHETALATTICE, AdjacencyListSBPLEnv< Coords >, EnvironmentROBARM, and EnvironmentXXX.
| virtual bool DiscreteSpaceInformation::SetEnvParameter | ( | const char * | parameter, | |
| int | value | |||
| ) | [inline, virtual] |
sets a parameter to a value. The set of supported parameters depends on the particular environment
Reimplemented in EnvironmentNAV2D, and EnvironmentNAVXYTHETALATTICE.
Definition at line 100 of file environment.h.
| virtual int DiscreteSpaceInformation::SizeofCreatedEnv | ( | ) | [pure virtual] |
returns the number of states (hashentries) created
Implemented in EnvironmentNAV2D, EnvironmentNAV2DUU, EnvironmentNAVXYTHETALAT, AdjacencyListSBPLEnv< Coords >, EnvironmentROBARM, and EnvironmentXXX.
debugging file
Definition at line 52 of file environment.h.
| std::vector<int*> DiscreteSpaceInformation::StateID2IndexMapping |
mapping from hashentry stateID (used in environment to contain the coordinates of a state, say x,y or x,y,theta) to an array of state indices used in searches. If a single search is done, then it is a single entry. So StateID2IndexMapping[100][0] = 5 means that hashentry with stateID 100 is mapped onto search index = 5 in search 0 The value of -1 means that no search state has been created yet for this hashentry
Definition at line 48 of file environment.h.

