#include <pluginlib/class_list_macros.h>#include <nodelet/nodelet.h>#include "hector_elevation_mapping.h"#include "pcl_ros/point_cloud.h"#include "pcl/point_types.h"#include <pcl_ros/transforms.h>#include <tf/transform_listener.h>#include <std_msgs/String.h>#include <sensor_msgs/point_cloud_conversion.h>#include <hector_elevation_msgs/ElevationMapMetaData.h>#include <hector_elevation_msgs/ElevationGrid.h>#include <nav_msgs/OccupancyGrid.h>#include <nav_msgs/MapMetaData.h>#include <hector_map_tools/HectorMapTools.h>#include <geometry_msgs/PoseWithCovarianceStamped.h>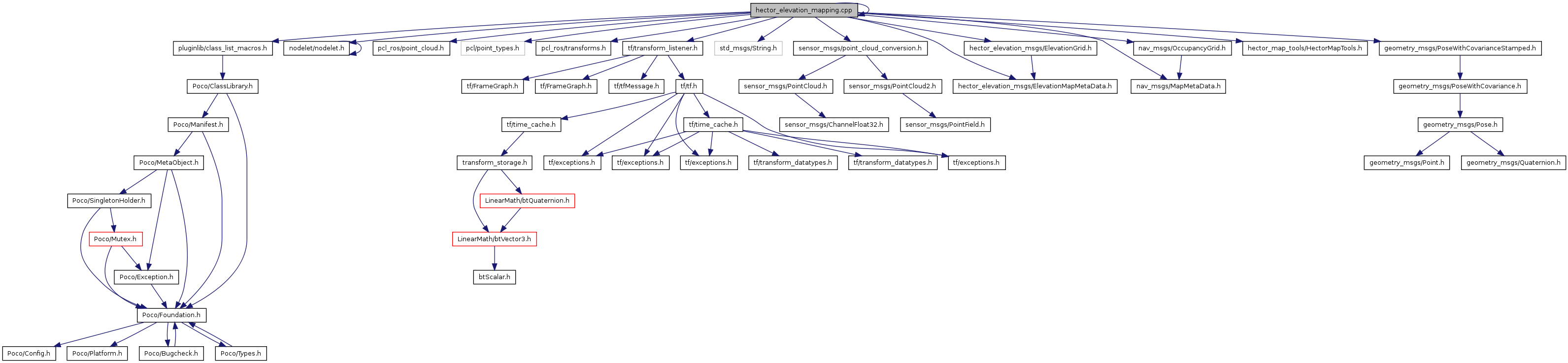

Go to the source code of this file.
Namespaces | |
| namespace | hector_elevation_mapping |
Defines | |
| #define | MAP_IDX(sx, i, j) ((sx) * (j) + (i)) |
| #define MAP_IDX | ( | sx, | |||
| i, | |||||
| j | ) | ((sx) * (j) + (i)) |
Definition at line 6 of file hector_elevation_mapping.cpp.

