#include <errno.h>#include <stdint.h>#include <string>#include <boost/format.hpp>#include <ros/ros.h>#include <velodyne_common/RawScan.h>#include <velodyne_msgs/VelodyneScan.h>#include <vector>#include <ostream>#include "ros/serialization.h"#include "ros/builtin_message_traits.h"#include "ros/message_operations.h"#include "ros/message.h"#include "ros/time.h"#include "std_msgs/Header.h"
Go to the source code of this file.
Classes | |
| struct | Velodyne::correction_angles |
| Correction angles for a specific HDL-64E device. More... | |
| class | Velodyne::Data |
| Base Velodyne data class -- not used directly. More... | |
| struct | Velodyne::raw_block |
| Raw Velodyne data block. More... | |
| struct | Velodyne::raw_packet |
| Raw Velodyne packet. More... | |
| union | Velodyne::two_bytes |
Namespaces | |
| namespace | Velodyne |
Typedefs | |
| typedef struct Velodyne::raw_block | Velodyne::raw_block_t |
| Raw Velodyne data block. | |
| typedef struct Velodyne::raw_packet | Velodyne::raw_packet_t |
| Raw Velodyne packet. | |
Variables | |
| static const int | Velodyne::BLOCK_DATA_SIZE = (SCANS_PER_BLOCK * RAW_SCAN_SIZE) |
| static const int | Velodyne::BLOCKS_PER_PACKET = 12 |
| static const float | Velodyne::DISTANCE_MAX = 130.0f |
| static const float | Velodyne::DISTANCE_MAX_UNITS |
| static const float | Velodyne::DISTANCE_RESOLUTION = 0.002f |
| static const uint16_t | Velodyne::LOWER_BANK = 0xddff |
| static const int | Velodyne::PACKET_SIZE = 1206 |
| static const int | Velodyne::PACKET_STATUS_SIZE = 4 |
| static const int | Velodyne::PACKETS_PER_REV = 260 |
| static const int | Velodyne::RAW_SCAN_SIZE = 3 |
| static const float | Velodyne::ROTATION_MAX_UNITS = 36000 |
| static const float | Velodyne::ROTATION_RESOLUTION = 0.01f |
| static const int | Velodyne::SCANS_PER_BLOCK = 32 |
| static const int | Velodyne::SCANS_PER_PACKET = (SCANS_PER_BLOCK * BLOCKS_PER_PACKET) |
| static const int | Velodyne::SCANS_PER_REV = (SCANS_PER_PACKET * PACKETS_PER_REV) |
| static const int | Velodyne::SIZE_BLOCK = 100 |
| static const uint16_t | Velodyne::UPPER_BANK = 0xeeff |
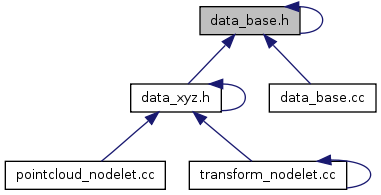
Velodyne HDL-64E 3D LIDAR data accessor base class.
Base class for unpacking raw Velodyne LIDAR packets into various useful formats.
Definition in file data_base.h.

