Defines the robot class hierarchy. More...
#include <vector>#include <map>#include <QTextStream>#include <QString>#include "collisionStructures.h"#include "mytools.h"#include "kinematicChain.h"#include "dof.h"#include "worldElement.h"#include "body.h"#include "joint.h"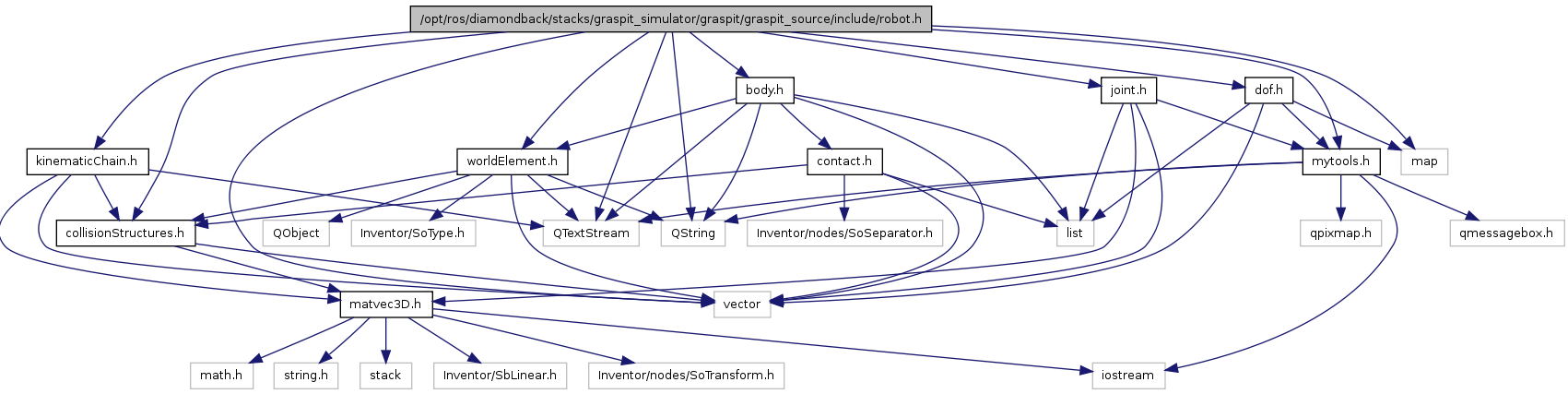
Go to the source code of this file.
Classes | |
| class | Hand |
| A hand is a special type of robot that can have a grasp associated with it. More... | |
| class | Robot |
| Base class for all robots which are collections of links connected by moveable joints. More... | |
Defines | |
| #define | ROBOT_H |
Defines the robot class hierarchy.
Definition in file robot.h.

