#include "gloveInterface.h"#include "robot.h"#include "world.h"#include "matvec3D.h"#include "jacobian.h"#include "lapack_wrappers.h"#include "debug.h"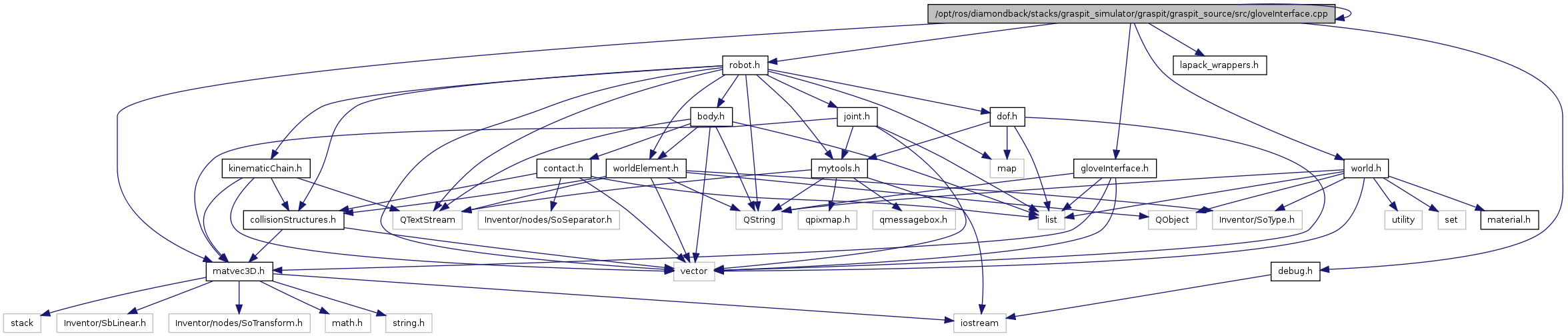

Go to the source code of this file.
Defines | |
| #define | N_SENSOR_VALUES 24 |
Functions | |
| void | loadPoseListFromFile (std::list< CalibrationPose * > *list, const char *filename) |
| Loads a list of calibration poses from a file. | |
| void | writePoseListToFile (std::list< CalibrationPose * > *list, const char *filename) |
| Saves a list of poses to a file. | |
| #define N_SENSOR_VALUES 24 |
Definition at line 33 of file gloveInterface.cpp.
| void loadPoseListFromFile | ( | std::list< CalibrationPose * > * | list, | |
| const char * | filename | |||
| ) |
Loads a list of calibration poses from a file.
Helper function loads all the calibration poses found in a file and stores them in a given list of poses. The poses have usually been save using (...)
Definition at line 177 of file gloveInterface.cpp.
| void writePoseListToFile | ( | std::list< CalibrationPose * > * | list, | |
| const char * | filename | |||
| ) |
Saves a list of poses to a file.
The poses can be read back by loadPosesListFromFile(...)
Definition at line 199 of file gloveInterface.cpp.

